|
Visual Servoing Platform
version 3.6.1 under development (2024-04-27)
|
|
Visual Servoing Platform
version 3.6.1 under development (2024-04-27)
|
#include <visp3/core/vpDisplay.h>
 Inheritance diagram for vpDisplay:
Inheritance diagram for vpDisplay:Public Types | |
| enum | vpScaleType { SCALE_AUTO , SCALE_1 , SCALE_2 , SCALE_3 , SCALE_4 , SCALE_5 , SCALE_6 , SCALE_7 , SCALE_8 , SCALE_9 , SCALE_10 , SCALE_DEFAULT } |
Public Member Functions | |
| vpDisplay () | |
| vpDisplay (const vpDisplay &d) | |
| virtual | ~vpDisplay () |
Inherited functionalities from vpDisplay | |
| unsigned int | computeAutoScale (unsigned int width, unsigned int height) |
| unsigned int | getDownScalingFactor () |
| unsigned int | getHeight () const |
| unsigned int | getWidth () const |
| int | getWindowXPosition () const |
| int | getWindowYPosition () const |
| bool | isInitialised () |
| virtual void | setDownScalingFactor (unsigned int scale) |
| virtual void | setDownScalingFactor (vpScaleType scaleType) |
Static Public Member Functions | |
Static public vpDisplay functionalities on gray level images. | |
| static void | close (vpImage< unsigned char > &I) |
| static void | display (const vpImage< unsigned char > &I) |
| static void | displayArrow (const vpImage< unsigned char > &I, const vpImagePoint &ip1, const vpImagePoint &ip2, const vpColor &color=vpColor::white, unsigned int w=4, unsigned int h=2, unsigned int thickness=1) |
| static void | displayArrow (const vpImage< unsigned char > &I, int i1, int j1, int i2, int j2, const vpColor &color=vpColor::white, unsigned int w=4, unsigned int h=2, unsigned int thickness=1) |
| static void | displayCamera (const vpImage< unsigned char > &I, const vpHomogeneousMatrix &cMo, const vpCameraParameters &cam, double size, const vpColor &color, unsigned int thickness) |
| static void | displayCircle (const vpImage< unsigned char > &I, const vpImageCircle &circle, const vpColor &color, bool fill=false, unsigned int thickness=1) |
| static void | displayCircle (const vpImage< unsigned char > &I, const vpImagePoint ¢er, unsigned int radius, const vpColor &color, bool fill=false, unsigned int thickness=1) |
| static void | displayCircle (const vpImage< unsigned char > &I, int i, int j, unsigned int radius, const vpColor &color, bool fill=false, unsigned int thickness=1) |
| static void | displayCross (const vpImage< unsigned char > &I, const vpImagePoint &ip, unsigned int size, const vpColor &color, unsigned int thickness=1) |
| static void | displayCross (const vpImage< unsigned char > &I, int i, int j, unsigned int size, const vpColor &color, unsigned int thickness=1) |
| static void | displayDotLine (const vpImage< unsigned char > &I, const vpImagePoint &ip1, const vpImagePoint &ip2, const vpColor &color, unsigned int thickness=1) |
| static void | displayDotLine (const vpImage< unsigned char > &I, int i1, int j1, int i2, int j2, const vpColor &color, unsigned int thickness=1) |
| static void | displayDotLine (const vpImage< unsigned char > &I, const std::vector< vpImagePoint > &ips, bool closeTheShape, const vpColor &color, unsigned int thickness=1) |
| static void | displayDotLine (const vpImage< unsigned char > &I, const std::list< vpImagePoint > &ips, bool closeTheShape, const vpColor &color, unsigned int thickness=1) |
| static void | displayEllipse (const vpImage< unsigned char > &I, const vpImagePoint ¢er, const double &coef1, const double &coef2, const double &coef3, bool use_normalized_centered_moments, const vpColor &color, unsigned int thickness=1, bool display_center=false, bool display_arc=false) |
| static void | displayEllipse (const vpImage< unsigned char > &I, const vpImagePoint ¢er, const double &coef1, const double &coef2, const double &coef3, const double &smallalpha, const double &highalpha, bool use_normalized_centered_moments, const vpColor &color, unsigned int thickness=1, bool display_center=false, bool display_arc=false) |
| static void | displayFrame (const vpImage< unsigned char > &I, const vpHomogeneousMatrix &cMo, const vpCameraParameters &cam, double size, const vpColor &color=vpColor::none, unsigned int thickness=1, const vpImagePoint &offset=vpImagePoint(0, 0), const std::string &frameName="", const vpColor &textColor=vpColor::black, const vpImagePoint &textOffset=vpImagePoint(15, 15)) |
| static void | displayLine (const vpImage< unsigned char > &I, const vpImagePoint &ip1, const vpImagePoint &ip2, const vpColor &color, unsigned int thickness=1, bool segment=true) |
| static void | displayLine (const vpImage< unsigned char > &I, int i1, int j1, int i2, int j2, const vpColor &color, unsigned int thickness=1, bool segment=true) |
| static void | displayLine (const vpImage< unsigned char > &I, const std::vector< vpImagePoint > &ips, bool closeTheShape, const vpColor &color, unsigned int thickness=1) |
| static void | displayLine (const vpImage< unsigned char > &I, const std::list< vpImagePoint > &ips, bool closeTheShape, const vpColor &color, unsigned int thickness=1) |
| static void | displayPoint (const vpImage< unsigned char > &I, const vpImagePoint &ip, const vpColor &color, unsigned int thickness=1) |
| static void | displayPoint (const vpImage< unsigned char > &I, int i, int j, const vpColor &color, unsigned int thickness=1) |
| static void | displayPolygon (const vpImage< unsigned char > &I, const std::vector< vpImagePoint > &vip, const vpColor &color, unsigned int thickness=1, bool closed=true) |
| static void | displayPolygon (const vpImage< unsigned char > &I, const vpPolygon &polygon, const vpColor &color, unsigned int thickness=1, bool closed=true) |
| static void | displayRectangle (const vpImage< unsigned char > &I, const vpImagePoint &topLeft, unsigned int width, unsigned int height, const vpColor &color, bool fill=false, unsigned int thickness=1) |
| static void | displayRectangle (const vpImage< unsigned char > &I, const vpImagePoint &topLeft, const vpImagePoint &bottomRight, const vpColor &color, bool fill=false, unsigned int thickness=1) |
| static void | displayRectangle (const vpImage< unsigned char > &I, const vpRect &rectangle, const vpColor &color, bool fill=false, unsigned int thickness=1) |
| static void | displayRectangle (const vpImage< unsigned char > &I, const vpImagePoint ¢er, float angle, unsigned int width, unsigned int height, const vpColor &color, unsigned int thickness=1) |
| static void | displayRectangle (const vpImage< unsigned char > &I, int i, int j, unsigned int width, unsigned int height, const vpColor &color, bool fill=false, unsigned int thickness=1) |
| static void | displayRectangle (const vpImage< unsigned char > &I, unsigned int i, unsigned int j, float angle, unsigned int width, unsigned int height, const vpColor &color, unsigned int thickness=1) |
| static void | displayROI (const vpImage< unsigned char > &I, const vpRect &roi) |
| static void | displayText (const vpImage< unsigned char > &I, const vpImagePoint &ip, const std::string &s, const vpColor &color) |
| static void | displayText (const vpImage< unsigned char > &I, int i, int j, const std::string &s, const vpColor &color) |
| static void | flush (const vpImage< unsigned char > &I) |
| static void | flushROI (const vpImage< unsigned char > &I, const vpRect &roi) |
| static bool | getClick (const vpImage< unsigned char > &I, bool blocking=true) |
| static bool | getClick (const vpImage< unsigned char > &I, vpImagePoint &ip, bool blocking=true) |
| static bool | getClick (const vpImage< unsigned char > &I, vpImagePoint &ip, vpMouseButton::vpMouseButtonType &button, bool blocking=true) |
| static bool | getClick (const vpImage< unsigned char > &I, vpMouseButton::vpMouseButtonType &button, bool blocking=true) |
| static bool | getClickUp (const vpImage< unsigned char > &I, vpImagePoint &ip, vpMouseButton::vpMouseButtonType &button, bool blocking=true) |
| static bool | getClickUp (const vpImage< unsigned char > &I, vpMouseButton::vpMouseButtonType &button, bool blocking=true) |
| static unsigned int | getDownScalingFactor (const vpImage< unsigned char > &I) |
| static void | getImage (const vpImage< unsigned char > &Is, vpImage< vpRGBa > &Id) |
| static bool | getKeyboardEvent (const vpImage< unsigned char > &I, bool blocking=true) |
| static bool | getKeyboardEvent (const vpImage< unsigned char > &I, std::string &key, bool blocking=true) |
| static bool | getKeyboardEvent (const vpImage< unsigned char > &I, char *key, bool blocking=true) |
| static bool | getPointerMotionEvent (const vpImage< unsigned char > &I, vpImagePoint &ip) |
| static bool | getPointerPosition (const vpImage< unsigned char > &I, vpImagePoint &ip) |
| static void | setBackground (const vpImage< unsigned char > &I, const vpColor &color) |
| static void | setFont (const vpImage< unsigned char > &I, const std::string &font) |
| static void | setTitle (const vpImage< unsigned char > &I, const std::string &windowtitle) |
| static void | setWindowPosition (const vpImage< unsigned char > &I, int winx, int winy) |
Static public vpDisplay functionalities on 32 bits color images. | |
| static void | close (vpImage< vpRGBa > &I) |
| static void | display (const vpImage< vpRGBa > &I) |
| static void | displayArrow (const vpImage< vpRGBa > &I, const vpImagePoint &ip1, const vpImagePoint &ip2, const vpColor &color=vpColor::white, unsigned int w=4, unsigned int h=2, unsigned int thickness=1) |
| static void | displayArrow (const vpImage< vpRGBa > &I, int i1, int j1, int i2, int j2, const vpColor &color=vpColor::white, unsigned int w=4, unsigned int h=2, unsigned int thickness=1) |
| static void | displayCamera (const vpImage< vpRGBa > &I, const vpHomogeneousMatrix &cMo, const vpCameraParameters &cam, double size, const vpColor &color, unsigned int thickness) |
| static void | displayCircle (const vpImage< vpRGBa > &I, const vpImageCircle &circle, const vpColor &color, bool fill=false, unsigned int thickness=1) |
| static void | displayCircle (const vpImage< vpRGBa > &I, const vpImagePoint ¢er, unsigned int radius, const vpColor &color, bool fill=false, unsigned int thickness=1) |
| static void | displayCircle (const vpImage< vpRGBa > &I, int i, int j, unsigned int radius, const vpColor &color, bool fill=false, unsigned int thickness=1) |
| static void | displayCross (const vpImage< vpRGBa > &I, const vpImagePoint &ip, unsigned int size, const vpColor &color, unsigned int thickness=1) |
| static void | displayCross (const vpImage< vpRGBa > &I, int i, int j, unsigned int size, const vpColor &color, unsigned int thickness=1) |
| static void | displayDotLine (const vpImage< vpRGBa > &I, const vpImagePoint &ip1, const vpImagePoint &ip2, const vpColor &color, unsigned int thickness=1) |
| static void | displayDotLine (const vpImage< vpRGBa > &I, int i1, int j1, int i2, int j2, const vpColor &color, unsigned int thickness=1) |
| static void | displayDotLine (const vpImage< vpRGBa > &I, const std::vector< vpImagePoint > &ips, bool closeTheShape, const vpColor &color, unsigned int thickness=1) |
| static void | displayDotLine (const vpImage< vpRGBa > &I, const std::list< vpImagePoint > &ips, bool closeTheShape, const vpColor &color, unsigned int thickness=1) |
| static void | displayEllipse (const vpImage< vpRGBa > &I, const vpImagePoint ¢er, const double &coef1, const double &coef2, const double &coef3, bool use_centered_moments, const vpColor &color, unsigned int thickness=1, bool display_center=false, bool display_arc=false) |
| static void | displayEllipse (const vpImage< vpRGBa > &I, const vpImagePoint ¢er, const double &coef1, const double &coef2, const double &coef3, const double &theta1, const double &theta2, bool use_centered_moments, const vpColor &color, unsigned int thickness=1, bool display_center=false, bool display_arc=false) |
| static void | displayFrame (const vpImage< vpRGBa > &I, const vpHomogeneousMatrix &cMo, const vpCameraParameters &cam, double size, const vpColor &color=vpColor::none, unsigned int thickness=1, const vpImagePoint &offset=vpImagePoint(0, 0), const std::string &frameName="", const vpColor &textColor=vpColor::black, const vpImagePoint &textOffset=vpImagePoint(15, 15)) |
| static void | displayLine (const vpImage< vpRGBa > &I, const vpImagePoint &ip1, const vpImagePoint &ip2, const vpColor &color, unsigned int thickness=1, bool segment=true) |
| static void | displayLine (const vpImage< vpRGBa > &I, int i1, int j1, int i2, int j2, const vpColor &color, unsigned int thickness=1, bool segment=true) |
| static void | displayLine (const vpImage< vpRGBa > &I, const std::vector< vpImagePoint > &ips, bool closeTheShape, const vpColor &color, unsigned int thickness=1) |
| static void | displayLine (const vpImage< vpRGBa > &I, const std::list< vpImagePoint > &ips, bool closeTheShape, const vpColor &color, unsigned int thickness=1) |
| static void | displayPoint (const vpImage< vpRGBa > &I, const vpImagePoint &ip, const vpColor &color, unsigned int thickness=1) |
| static void | displayPoint (const vpImage< vpRGBa > &I, int i, int j, const vpColor &color, unsigned int thickness=1) |
| static void | displayPolygon (const vpImage< vpRGBa > &I, const std::vector< vpImagePoint > &vip, const vpColor &color, unsigned int thickness=1, bool closed=true) |
| static void | displayPolygon (const vpImage< vpRGBa > &I, const vpPolygon &polygon, const vpColor &color, unsigned int thickness=1, bool closed=true) |
| static void | displayRectangle (const vpImage< vpRGBa > &I, const vpImagePoint &topLeft, unsigned int width, unsigned int height, const vpColor &color, bool fill=false, unsigned int thickness=1) |
| static void | displayRectangle (const vpImage< vpRGBa > &I, const vpImagePoint &topLeft, const vpImagePoint &bottomRight, const vpColor &color, bool fill=false, unsigned int thickness=1) |
| static void | displayRectangle (const vpImage< vpRGBa > &I, const vpRect &rectangle, const vpColor &color, bool fill=false, unsigned int thickness=1) |
| static void | displayRectangle (const vpImage< vpRGBa > &I, const vpImagePoint ¢er, float angle, unsigned int width, unsigned int height, const vpColor &color, unsigned int thickness=1) |
| static void | displayRectangle (const vpImage< vpRGBa > &I, int i, int j, unsigned int width, unsigned int height, const vpColor &color, bool fill=false, unsigned int thickness=1) |
| static void | displayRectangle (const vpImage< vpRGBa > &I, unsigned int i, unsigned int j, float angle, unsigned int width, unsigned int height, const vpColor &color, unsigned int thickness=1) |
| static void | displayROI (const vpImage< vpRGBa > &I, const vpRect &roi) |
| static void | displayText (const vpImage< vpRGBa > &I, const vpImagePoint &ip, const std::string &s, const vpColor &color) |
| static void | displayText (const vpImage< vpRGBa > &I, int i, int j, const std::string &s, const vpColor &color) |
| static void | flush (const vpImage< vpRGBa > &I) |
| static void | flushROI (const vpImage< vpRGBa > &I, const vpRect &roi) |
| static bool | getClick (const vpImage< vpRGBa > &I, bool blocking=true) |
| static bool | getClick (const vpImage< vpRGBa > &I, vpImagePoint &ip, bool blocking=true) |
| static bool | getClick (const vpImage< vpRGBa > &I, vpImagePoint &ip, vpMouseButton::vpMouseButtonType &button, bool blocking=true) |
| static bool | getClick (const vpImage< vpRGBa > &I, vpMouseButton::vpMouseButtonType &button, bool blocking=true) |
| static bool | getClickUp (const vpImage< vpRGBa > &I, vpImagePoint &ip, vpMouseButton::vpMouseButtonType &button, bool blocking=true) |
| static bool | getClickUp (const vpImage< vpRGBa > &I, vpMouseButton::vpMouseButtonType &button, bool blocking=true) |
| static unsigned int | getDownScalingFactor (const vpImage< vpRGBa > &I) |
| static void | getImage (const vpImage< vpRGBa > &Is, vpImage< vpRGBa > &Id) |
| static bool | getKeyboardEvent (const vpImage< vpRGBa > &I, bool blocking=true) |
| static bool | getKeyboardEvent (const vpImage< vpRGBa > &I, std::string &key, bool blocking=true) |
| static bool | getKeyboardEvent (const vpImage< vpRGBa > &I, char *key, bool blocking=true) |
| static bool | getPointerMotionEvent (const vpImage< vpRGBa > &I, vpImagePoint &ip) |
| static bool | getPointerPosition (const vpImage< vpRGBa > &I, vpImagePoint &ip) |
| static void | setBackground (const vpImage< vpRGBa > &I, const vpColor &color) |
| static void | setFont (const vpImage< vpRGBa > &I, const std::string &font) |
| static void | setTitle (const vpImage< vpRGBa > &I, const std::string &windowtitle) |
| static void | setWindowPosition (const vpImage< vpRGBa > &I, int winx, int winy) |
Protected Member Functions | |
| void | setScale (vpScaleType scaleType, unsigned int width, unsigned int height) |
Protected Attributes | |
| bool | m_displayHasBeenInitialized |
| int | m_windowXPosition |
| int | m_windowYPosition |
| unsigned int | m_width |
| unsigned int | m_height |
| std::string | m_title |
| unsigned int | m_scale |
| vpScaleType | m_scaleType |
Deprecated functions | |
| static vp_deprecated void | displayCharString (const vpImage< unsigned char > &I, const vpImagePoint &ip, const char *string, const vpColor &color) |
| static vp_deprecated void | displayCharString (const vpImage< unsigned char > &I, int i, int j, const char *string, const vpColor &color) |
| static vp_deprecated void | displayCharString (const vpImage< vpRGBa > &I, const vpImagePoint &ip, const char *string, const vpColor &color) |
| static vp_deprecated void | displayCharString (const vpImage< vpRGBa > &I, int i, int j, const char *string, const vpColor &color) |
Class that defines generic functionalities for display.
The Tutorial: How to create and build a project that uses ViSP and CMake on Unix or Windows is a good starting point to know how to use this class to display an image in a window.
The example below shows how to use this class.
Other examples are available in tutorial-image-viewer.cpp and tutorial-viewer.cpp.
Definition at line 172 of file vpDisplay.h.
Values that could be applied to a display to down scale the size of the display.
| Enumerator | |
|---|---|
| SCALE_AUTO | Auto down scaling factor computed fom the screen resolution. |
| SCALE_1 | Display and image have the same size. |
| SCALE_2 | Display width and height is down scaled by 2 wrt the image size. |
| SCALE_3 | Display width and height is down scaled by 3 wrt the image size. |
| SCALE_4 | Display width and height is down scaled by 4 wrt the image size. |
| SCALE_5 | Display width and height is down scaled by 5 wrt the image size. |
| SCALE_6 | Display width and height is down scaled by 6 wrt the image size. |
| SCALE_7 | Display width and height is down scaled by 7 wrt the image size. |
| SCALE_8 | Display width and height is down scaled by 8 wrt the image size. |
| SCALE_9 | Display width and height is down scaled by 9 wrt the image size. |
| SCALE_10 | Display width and height is down scaled by 10 wrt the image size. |
| SCALE_DEFAULT | Display and image have the same size. Similar to vpDisplay::SCALE_1. |
Definition at line 177 of file vpDisplay.h.
| vpDisplay::vpDisplay | ( | ) |
Default constructor.
Definition at line 54 of file vpDisplay.cpp.
| vpDisplay::vpDisplay | ( | const vpDisplay & | d | ) |
Copy constructor.
Definition at line 62 of file vpDisplay.cpp.
|
virtual |
Destructor that deallocates memory.
Definition at line 71 of file vpDisplay.cpp.
References m_displayHasBeenInitialized.
|
static |
Close the display attached to I.
Definition at line 48 of file vpDisplay_uchar.cpp.
Close the display attached to I.
Definition at line 48 of file vpDisplay_rgba.cpp.
| unsigned int vpDisplay::computeAutoScale | ( | unsigned int | width, |
| unsigned int | height | ||
| ) |
Computes the down scaling factor that should be applied to the window size to display the image given the resolution of the screen.
| width,height | : Image size. |
Definition at line 243 of file vpDisplay.cpp.
Referenced by setScale().
|
static |
Display image I.
| I | : Image to display. |
Definition at line 825 of file vpDisplay_uchar.cpp.
Referenced by vpDot2::defineDots(), drawingHelpers::display(), vpWireFrameSimulator::getExternalImage(), vpWireFrameSimulator::getInternalImage(), vpPlot::init(), vpMbTracker::initClick(), vpMbGenericTracker::initFromPose(), vpDisplayOpenCV::on_mouse(), vpMbDepthDenseTracker::segmentPointCloud(), vpMbDepthNormalTracker::segmentPointCloud(), vpSimulatorAfma6::setPosition(), vpMeEllipse::track(), vpSimulatorAfma6::updateArticularPosition(), and vpSimulatorViper850::updateArticularPosition().
Display image I.
| I | : Image to display. |
Definition at line 825 of file vpDisplay_rgba.cpp.
|
static |
Display an arrow from image point ip1 to image point ip2.
| I | : The image associated to the display. |
| ip1,ip2 | : Initial and final image points. |
| color | : Arrow color. |
| w,h | : Width and height of the arrow. |
| thickness | : Thickness of the lines used to display the arrow. |
Definition at line 58 of file vpDisplay_uchar.cpp.
Referenced by vpMeLine::computeRhoTheta(), vpMbDepthNormalTracker::display(), vpProjectionDisplay::displayCamera(), and vpMbtFaceDepthNormal::displayFeature().
|
static |
Display an arrow from image point (i1,j1) to image point (i2,j2).
| I | : The image associated to the display. |
| i1,j1 | : Initial image point. |
| i2,j2 | : Final image point. |
| color | : Arrow color. |
| w,h | : Width and height of the arrow. |
| thickness | : Thickness of the lines used to display the arrow. |
Definition at line 74 of file vpDisplay_uchar.cpp.
|
static |
Display an arrow from image point ip1 to image point ip2.
| I | : The image associated to the display. |
| ip1,ip2 | : Initial and final image points. |
| color | : Arrow color. |
| w,h | : Width and height of the arrow. |
| thickness | : Thickness of the lines used to display the arrow. |
Definition at line 58 of file vpDisplay_rgba.cpp.
|
static |
Display an arrow from image point (i1,j1) to image point (i2,j2).
| I | : The image associated to the display. |
| i1,j1 | : Initial image point. |
| i2,j2 | : Final image point. |
| color | : Arrow color. |
| w,h | : Width and height of the arrow. |
| thickness | : Thickness of the lines used to display the arrow. |
Definition at line 74 of file vpDisplay_rgba.cpp.
|
static |
Display the projection of an object camera represented by a cone in the image.
| I | : The image associated to the display. |
| cMo | : Homogeneous matrix that gives the transformation between the camera frame and the object frame to project in the image. |
| cam | : Camera intrinsic parameters. |
| size | : Size of the object camera. |
| color | : Color used to display the camera in the image. |
| thickness | : Thickness of the graphics drawing. |
Definition at line 93 of file vpDisplay_uchar.cpp.
Referenced by vpSimulatorAfma6::updateArticularPosition(), and vpSimulatorViper850::updateArticularPosition().
|
static |
Display the projection of an object camera represented by a cone in the image.
| I | : The image associated to the display. |
| cMo | : Homogeneous matrix that gives the transformation between the camera frame and the object frame to project in the image. |
| cam | : Camera intrinsic parameters. |
| size | : Size of the object camera. |
| color | : Color used to display the camera in the image. |
| thickness | : Thickness of the graphics drawing. |
Definition at line 93 of file vpDisplay_rgba.cpp.
|
static |
To select the font used to display the string, use setFont().
| I | : Image associated to the display. |
| ip | : Upper left image point location of the string in the display. |
| string | : String to display in overlay. |
| color | : String color. |
Definition at line 113 of file vpDisplay_uchar.cpp.
|
static |
To select the font used to display the string, use setFont().
| I | : Image associated to the display. |
| i,j | : Upper left image point location of the string in the display. |
| string | : String to display in overlay. |
| color | : String color. |
Definition at line 132 of file vpDisplay_uchar.cpp.
|
static |
To select the font used to display the string, use setFont().
| I | : Image associated to the display. |
| ip | : Upper left image point location of the string in the display. |
| string | : String to display in overlay. |
| color | : String color. |
Definition at line 113 of file vpDisplay_rgba.cpp.
|
static |
To select the font used to display the string, use setFont().
| I | : Image associated to the display. |
| i,j | : Upper left image point location of the string in the display. |
| string | : String to display in overlay. |
| color | : String color. |
Definition at line 132 of file vpDisplay_rgba.cpp.
|
static |
Display a circle.
| I | : The image associated to the display. |
| circle | : Circle to display. |
| color | : Circle color. |
| fill | : When set to true fill the circle. When vpDisplayOpenCV is used, and color alpha channel is set, filling feature can handle transparency. See vpColor header class documentation. |
| thickness | : Thickness of the circle. This parameter is only useful when fill is set to false. |
Definition at line 150 of file vpDisplay_uchar.cpp.
References vpImageCircle::getCenter(), and vpImageCircle::getRadius().
Referenced by vpFeatureSegment::display(), vpProjectionDisplay::display(), vpKeyPoint::displayMatching(), and vpDot2::trackAndDisplay().
|
static |
Display a circle.
| I | : The image associated to the display. |
| center | : Circle center position. |
| radius | : Circle radius. |
| color | : Circle color. |
| fill | : When set to true fill the circle. When vpDisplayOpenCV is used, and color alpha channel is set, filling feature can handle transparency. See vpColor header class documentation. |
| thickness | : Thickness of the circle. This parameter is only useful when fill is set to false. |
Definition at line 168 of file vpDisplay_uchar.cpp.
|
static |
Display a circle.
| I | : The image associated to the display. |
| i,j | : Circle center position. |
| radius | : Circle radius. |
| color | : Circle color. |
| fill | : When set to true fill the circle. When vpDisplayOpenCV is used, and color alpha channel is set, filling feature can handle transparency. See vpColor header class documentation. |
| thickness | : Thickness of the circle. This parameter is only useful when fill is set to false. |
Definition at line 186 of file vpDisplay_uchar.cpp.
|
static |
Display a circle.
| I | : The image associated to the display. |
| circle | Circle to display. |
| color | : Circle color. |
| fill | : When set to true fill the circle. When vpDisplayOpenCV is used, and color alpha channel is set, filling feature can handle transparency. See vpColor header class documentation. |
| thickness | : Thickness of the circle. This parameter is only useful when fill is set to false. |
Definition at line 149 of file vpDisplay_rgba.cpp.
References vpImageCircle::getCenter(), and vpImageCircle::getRadius().
|
static |
Display a circle.
| I | : The image associated to the display. |
| center | : Circle center position. |
| radius | : Circle radius. |
| color | : Circle color. |
| fill | : When set to true fill the circle. When vpDisplayOpenCV is used, and color alpha channel is set, filling feature can handle transparency. See vpColor header class documentation. |
| thickness | : Thickness of the circle. This parameter is only useful when fill is set to false. |
Definition at line 167 of file vpDisplay_rgba.cpp.
|
static |
Display a circle.
| I | : The image associated to the display. |
| i,j | : Circle center position. |
| radius | : Circle radius. |
| color | : Circle color. |
| fill | : When set to true fill the circle. When vpDisplayOpenCV is used, and color alpha channel is set, filling feature can handle transparency. See vpColor header class documentation. |
| thickness | : Thickness of the circle. This parameter is only useful when fill is set to false. |
Definition at line 185 of file vpDisplay_rgba.cpp.
|
static |
Display a cross at the image point ip location.
| I | : The image associated to the display. |
| ip | : Cross location. |
| size | : Size (width and height) of the cross. |
| color | : Cross color. |
| thickness | : Thickness of the lines used to display the cross. |
Definition at line 200 of file vpDisplay_uchar.cpp.
Referenced by vpMbtDistanceCylinder::computeInteractionMatrixError(), vpDot2::defineDots(), vpMeSite::display(), vpKltOpencv::display(), vpMbEdgeKltTracker::display(), vpMbKltTracker::display(), vpDot::display(), vpDot2::display(), vpMeNurbs::display(), vpKeyPoint::display(), vpCalibration::displayData(), vpMbEdgeTracker::displayFeaturesOnImage(), vpCalibration::displayGrid(), vpMeLine::displayLine(), vpKeyPoint::displayMatching(), vpPose::displayModel(), vpFeatureDisplay::displayPoint(), vpMbtDistanceKltCylinder::displayPrimitive(), vpMbtDistanceKltPoints::displayPrimitive(), vpMeSite::getQueryList(), vpTemplateTrackerZone::initClick(), vpPolygon::initClick(), vpMbTracker::initClick(), vpMbGenericTracker::initFromPose(), vpMeLine::initTracking(), vpMeNurbs::initTracking(), vpMeEllipse::initTracking(), vpMeEllipse::leastSquareRobust(), vpMeEllipse::plugHoles(), vpMeEllipse::sample(), vpMeLine::sample(), vpMeLine::seekExtremities(), vpMeNurbs::seekExtremities(), vpDot::track(), and vpDot2::track().
|
static |
Display a cross at the image point (i,j) location.
| I | : The image associated to the display. |
| i,j | : Cross location. |
| size | : Size (width and height) of the cross. |
| color | : Cross color. |
| thickness | : Thickness of the lines used to display the cross. |
Definition at line 214 of file vpDisplay_uchar.cpp.
|
static |
Display a cross at the image point ip location.
| I | : The image associated to the display. |
| ip | : Cross location. |
| size | : Size (width and height) of the cross. |
| color | : Cross color. |
| thickness | : Thickness of the lines used to display the cross. |
Definition at line 199 of file vpDisplay_rgba.cpp.
|
static |
Display a cross at the image point (i,j) location.
| I | : The image associated to the display. |
| i,j | : Cross location. |
| size | : Size (width and height) of the cross. |
| color | : Cross color. |
| thickness | : Thickness of the lines used to display the cross. |
Definition at line 213 of file vpDisplay_rgba.cpp.
|
static |
Display dashed lines for the list of image points.
| I | : The image associated to the display. |
| ips | : List of image points. |
| closeTheShape | : If true, display a dashed line from the first and last image points. |
| color | : Line color. |
| thickness | : Dashed line thickness. |
Definition at line 282 of file vpDisplay_uchar.cpp.
References vpImagePoint::distance().
|
static |
Display dashed lines for the list of image points.
| I | : The image associated to the display. |
| ips | : Vector of image points. |
| closeTheShape | : If true, display a dashed line from the first and last image points. |
| color | : Line color. |
| thickness | : Dashed line thickness. |
Definition at line 256 of file vpDisplay_uchar.cpp.
|
static |
Display a dashed line from image point ip1 to image point ip2.
| I | : The image associated to the display. |
| ip1,ip2 | : Initial and final image points. |
| color | : Line color. |
| thickness | : Dashed line thickness. |
Definition at line 227 of file vpDisplay_uchar.cpp.
Referenced by vpDot2::trackAndDisplay().
|
static |
Display a dashed line from image point (i1,j1) to image point (i2,j2).
| I | : The image associated to the display. |
| i1,j1 | Initial image point. |
| i2,j2 | Final image point. |
| color | : Line color. |
| thickness | : Dashed line thickness. |
Definition at line 241 of file vpDisplay_uchar.cpp.
|
static |
Display the dashed lines formed by the list of image points
| I | : The image associated to the display. |
| ips | : List of image points. |
| closeTheShape | : If true, display a dashed line from the first and last image points. |
| color | : Line color. |
| thickness | : Dashed line thickness. |
Definition at line 280 of file vpDisplay_rgba.cpp.
References vpImagePoint::distance().
|
static |
Display the dashed lines formed by the list of image points
| I | : The image associated to the display. |
| ips | : Vector of image points. |
| closeTheShape | : If true, display a dashed line from the first and last image points. |
| color | : Line color. |
| thickness | : Dashed line thickness. |
Definition at line 255 of file vpDisplay_rgba.cpp.
|
static |
Display a dashed line from image point ip1 to image point ip2.
| I | : The image associated to the display. |
| ip1,ip2 | : Initial and final image points. |
| color | : Line color. |
| thickness | : Dashed line thickness. |
Definition at line 226 of file vpDisplay_rgba.cpp.
|
static |
Display a dashed line from image point (i1,j1) to image point (i2,j2).
| I | : The image associated to the display. |
| i1,j1 | Initial image point. |
| i2,j2 | Final image point. |
| color | : Line color. |
| thickness | : Dashed line thickness. |
Definition at line 240 of file vpDisplay_rgba.cpp.
|
static |
Display an ellipse from its parameters expressed in pixels.
| I | : Image to consider. |
| center | : Center  of the ellipse. of the ellipse. |
| coef1,coef2,coef3 | : Depending on the parameter use_normalized_centered_moments these parameters are:
|
| use_normalized_centered_moments | : When false, the parameters coef1, coef2, coef3 are the parameters  . When true, the parameters coef1, coef2, coef3 are rather the normalized centered moments . When true, the parameters coef1, coef2, coef3 are rather the normalized centered moments  expressed in pixels. In that case, we compute the parameters a, b and e from the centered moments. expressed in pixels. In that case, we compute the parameters a, b and e from the centered moments. |
| color | : Ellipse color. |
| thickness | : Ellipse thickness. |
| display_center | : Display a cross at the center of the ellipse. |
| display_arc | : Display a line between the center and the first arc extremity and a line between the center and the second arc extremity. |
The following example shows how to use for example this function to display the result of a tracking.
Definition at line 340 of file vpDisplay_uchar.cpp.
Referenced by vpMbtDistanceCircle::display(), vpMbEdgeKltTracker::display(), vpMbEdgeTracker::display(), vpMbKltTracker::display(), vpMeEllipse::displayEllipse(), displayEllipse(), and vpFeatureDisplay::displayEllipse().
|
static |
Display an ellipse from its parameters expressed in pixels.
| I | : Image to consider. |
| center | : Center of the ellipse. |
| coef1,coef2,coef3 | : Depending on the parameter use_normalized_centered_moments these parameters are:
|
| smallalpha | : Smallest  angle in rad (0 for a complete ellipse). angle in rad (0 for a complete ellipse). |
| highalpha | : Highest angle in rad (2  for a complete ellipse). for a complete ellipse). |
| use_normalized_centered_moments | : When false, the parameters coef1, coef2, coef3 are the parameters . When true, the parameters coef1, coef2, coef3 are rather the normalized centered moments expressed in pixels. In that case, we compute the parameters a, b and e from the centered moments. |
| color | : Ellipse color. |
| thickness | : Ellipse thickness. |
| display_center | : Display a cross at the center of the ellipse. |
| display_arc | : Display a line between the center and the first arc extremity and a line between the center and the second arc extremity. |
The following example shows how to use for example this function to display the result of a tracking.
Definition at line 387 of file vpDisplay_uchar.cpp.
|
static |
Display an ellipse from its parameters expressed in pixels.
| I | : Image to consider. |
| center | : Center of the ellipse. |
| coef1,coef2,coef3 | : Depending on the parameter use_normalized_centered_moments these parameters are:
|
| use_normalized_centered_moments | : When false, the parameters coef1, coef2, coef3 are the parameters . When true, the parameters coef1, coef2, coef3 are rather the normalized centered moments expressed in pixels. In that case, we compute the parameters a, b and e from the centered moments. |
| color | : Ellipse color. |
| thickness | : Ellipse thickness. |
| display_center | : Display a cross at the center of the ellipse. |
| display_arc | : Display a line between the center and the first arc extremity and a line between the center and the second arc extremity. |
The following example shows how to use for example this function to display the result of a tracking.
Definition at line 339 of file vpDisplay_rgba.cpp.
References displayEllipse().
|
static |
Display an ellipse from its parameters expressed in pixels.
| I | : Image to consider. |
| center | : Center of the ellipse. |
| coef1,coef2,coef3 | : Depending on the parameter use_normalized_centered_moments these parameters are:
|
| smallalpha | : Smallest angle in rad (0 for a complete ellipse). |
| highalpha | : Highest angle in rad (2 for a complete ellipse). |
| use_normalized_centered_moments | : When false, the parameters coef1, coef2, coef3 are the parameters . When true, the parameters coef1, coef2, coef3 are rather the normalized centered moments expressed in pixels. In that case, we compute the parameters a, b and e from the centered moments. |
| color | : Ellipse color. |
| thickness | : Ellipse thickness. |
| display_center | : Display a cross at the center of the ellipse. |
| display_arc | : Display a line between the center and the first arc extremity and a line between the center and the second arc extremity. |
The following example shows how to use for example this function to display the result of a tracking.
Definition at line 386 of file vpDisplay_rgba.cpp.
|
static |
Display the projection of an object frame represented by 3 arrows in the image. Red, green and blue arrows correspond to frame X, Y and Z axis respectively.
| I | : The image associated to the display. |
| cMo | : Homogeneous matrix that gives the transformation between the camera frame and the object frame to project in the image. |
| cam | : Camera intrinsic parameters. |
| size | : Size of the object frame. |
| color | : Color used to display the frame in the image. |
| thickness | : the thickness of the line. |
| offset | : Offset in pixels applied to the frame origin location in the image. |
| frameName | : Text to display along side the origin of the frame. |
| textColor | : Color of the text associated to frameName. |
| textOffset | : Offset used to shift the text from the origin of the frame. |
Definition at line 413 of file vpDisplay_uchar.cpp.
Referenced by vpPose::display(), vpMbTracker::initClick(), vpSimulatorAfma6::updateArticularPosition(), and vpSimulatorViper850::updateArticularPosition().
|
static |
Display the projection of an object frame represented by 3 arrows in the image. Red, green and blue arrows correspond to frame X, Y and Z axis respectively.
| I | : The image associated to the display. |
| cMo | : Homogeneous matrix that gives the transformation between the camera frame and the object frame to project in the image. |
| cam | : Camera intrinsic parameters. |
| size | : Size of the object frame. |
| color | : Color used to display the frame in the image. |
| thickness | : the thickness of the line. |
| offset | : Offset in pixels applied to the frame origin location in the image. |
| frameName | : Text to display along side the origin of the frame. |
| textColor | : Color of the text associated to frameName. |
| textOffset | : Offset used to shift the text from the origin of the frame. |
Definition at line 412 of file vpDisplay_rgba.cpp.
|
static |
Display the lines formed by the list of image points.
| I | : The image associated to the display. |
| ips | : List of image points. |
| closeTheShape | : If true, display a line from the first and last image points. |
| color | : Line color. |
| thickness | : Line thickness. |
Definition at line 537 of file vpDisplay_uchar.cpp.
References vpImagePoint::distance().
|
static |
Display the lines formed by the list of image points.
| I | : The image associated to the display. |
| ips | : Vector of image points. |
| closeTheShape | : If true, display a line from the first and last image points. |
| color | : Line color. |
| thickness | : Line thickness. |
Definition at line 512 of file vpDisplay_uchar.cpp.
|
static |
Display a line from image point ip1 to image point ip2.
| I | : The image associated to the display. |
| ip1,ip2 | : Initial and final image points. |
| color | : Line color. |
| thickness | : Line thickness. |
| segment | If true (default) display the segment between the two image points. If false, display the line passing through the two image points. |
Definition at line 429 of file vpDisplay_uchar.cpp.
References vpImagePoint::get_i(), and vpImagePoint::get_j().
Referenced by vpFeatureSegment::display(), vpTemplateTrackerZone::display(), vpPolygon::display(), vpHistogram::display(), vpMbtDistanceCylinder::display(), vpMbtDistanceKltCylinder::display(), vpMbtDistanceKltPoints::display(), vpMbtDistanceLine::display(), vpMbtFaceDepthDense::display(), vpMbtFaceDepthNormal::display(), vpMbDepthDenseTracker::display(), vpMbDepthNormalTracker::display(), vpMbEdgeKltTracker::display(), vpMbEdgeTracker::display(), vpMbKltTracker::display(), vpWireFrameSimulator::display_scene(), vpMeLine::displayLine(), displayLine(), vpFeatureDisplay::displayLine(), vpKeyPoint::displayMatching(), vpWireFrameSimulator::displayTrajectory(), vpWireFrameSimulator::getExternalImage(), vpTemplateTrackerZone::initClick(), vpMbDepthDenseTracker::segmentPointCloud(), vpMbDepthNormalTracker::segmentPointCloud(), vpSimulatorAfma6::updateArticularPosition(), and vpSimulatorViper850::updateArticularPosition().
|
static |
Display a line from image point (i1,j1) to image point (i2,j2).
| I | : The image associated to the display. |
| i1,j1 | Initial image point. |
| i2,j2 | Final image point. |
| color | : Line color. |
| thickness | : Line thickness. |
| segment | If true (default) display the segment between the two image points. If false, display the line passing through the two image points. |
Definition at line 446 of file vpDisplay_uchar.cpp.
References vpImagePoint::get_i(), vpImagePoint::get_j(), vpImage< Type >::getHeight(), and vpImage< Type >::getWidth().
|
static |
Display the lines formed by the list of image points.
| I | : The image associated to the display. |
| ips | : List of image points. |
| closeTheShape | : If true, draw a line from the first and last image points. |
| color | : Line color. |
| thickness | : Line thickness. |
Definition at line 538 of file vpDisplay_rgba.cpp.
References vpImagePoint::distance().
|
static |
Display the lines formed by the list of image points.
| I | : The image associated to the display. |
| ips | : Vector of image points. |
| closeTheShape | : If true, draw a line from the first and last image points. |
| color | : Line color. |
| thickness | : Line thickness. |
Definition at line 512 of file vpDisplay_rgba.cpp.
|
static |
Display a line from image point ip1 to image point ip2.
| I | : The image associated to the display. |
| ip1,ip2 | : Initial and final image points. |
| color | : Line color. |
| thickness | : Line thickness. |
| segment | If true (default) display the segment between the two image points. If false, display the line passing through the two image points. |
Definition at line 428 of file vpDisplay_rgba.cpp.
References displayLine(), vpImagePoint::get_i(), and vpImagePoint::get_j().
|
static |
Display a line from image point (i1,j1) to image point (i2,j2).
| I | : The image associated to the display. |
| i1,j1 | Initial image point. |
| i2,j2 | Final image point. |
| color | : Line color. |
| thickness | : Line thickness. |
| segment | If true (default) display the segment between the two image points. If false, display the line passing through the two image points. |
Definition at line 445 of file vpDisplay_rgba.cpp.
References vpImagePoint::get_i(), vpImagePoint::get_j(), vpImage< Type >::getHeight(), and vpImage< Type >::getWidth().
|
static |
Display a point at the image point ip location.
| I | : The image associated to the display. |
| ip | : Point location. |
| color | : Point color. |
| thickness | : Thickness of the point |
Definition at line 566 of file vpDisplay_uchar.cpp.
Referenced by vpDot::display(), vpDot2::display(), vpWireFrameSimulator::displayTrajectory(), vpWireFrameSimulator::getExternalImage(), vpMbTracker::initClick(), vpMeNurbs::seekExtremitiesCanny(), and vpMeSite::track().
|
static |
Display a point at the image point (i,j) location.
| I | : The image associated to the display. |
| i,j | : Point location. |
| color | : Point color. |
| thickness | : Thickness of the point |
Definition at line 579 of file vpDisplay_uchar.cpp.
|
static |
Display a point at the image point ip location.
| I | : The image associated to the display. |
| ip | : Point location. |
| color | : Point color. |
| thickness | : Thickness of the point |
Definition at line 568 of file vpDisplay_rgba.cpp.
|
static |
Display a point at the image point (i,j) location.
| I | : The image associated to the display. |
| i,j | : Point location. |
| color | : Point color. |
| thickness | : Thickness of the point |
Definition at line 581 of file vpDisplay_rgba.cpp.
|
static |
Display a polygon defined by a vector of image points.
| I | : The image associated to the display. |
| vip | : Vector of image point that define the vertexes of the polygon. |
| color | : Line color. |
| thickness | : Line thickness. |
| closed | : When true display a closed polygon with a segment between first and last image point. |
Definition at line 593 of file vpDisplay_uchar.cpp.
|
static |
Display a polygon defined by a set of image points.
| I | : The image associated to the display. |
| polygon | : Polygon to display. |
| color | : Line color. |
| thickness | : Line thickness. |
| closed | : When true display a closed polygon with a segment between first and last image point. |
Definition at line 607 of file vpDisplay_uchar.cpp.
|
static |
Display a polygon defined by a vector of image points.
| I | : The image associated to the display. |
| vip | : Vector of image point that define the vertexes of the polygon. |
| color | : Line color. |
| thickness | : Line thickness. |
| closed | : When true display a closed polygon with a segment between first and last image point. |
Definition at line 594 of file vpDisplay_rgba.cpp.
|
static |
Display a polygon defined by a set of image points.
| I | : The image associated to the display. |
| polygon | : Polygon to display. |
| color | : Line color. |
| thickness | : Line thickness. |
| closed | : When true display a closed polygon with a segment between first and last image point. |
Definition at line 608 of file vpDisplay_rgba.cpp.
|
static |
Display a rectangle defined by its center, its orientation (angle) and its size.
| I | : Image associated to the display. |
| center | : Rectangle center point. |
| angle | : Angle in radians width an horizontal axis oriented from left to right. |
| width,height | : Rectangle size. |
| color | : Rectangle color. |
| thickness | : Thickness of the four lines used to display the rectangle. |
Definition at line 689 of file vpDisplay_uchar.cpp.
|
static |
Display a rectangle with topLeft as the top-left corner and width and height the rectangle size.
| I | : The image associated to the display. |
| topLeft | : Top-left corner of the rectangle. |
| bottomRight | : Bottom-right corner of the rectangle. |
| color | : Rectangle color. |
| fill | : When set to true fill the rectangle. When vpDisplayOpenCV is used, and color alpha channel is set, filling feature can handle transparency. See vpColor header class documentation. |
| thickness | : Thickness of the four lines used to display the rectangle. This parameter is only useful when fill is set to false. |
Definition at line 711 of file vpDisplay_uchar.cpp.
|
static |
Display a rectangle with topLeft as the top-left corner and width and height the rectangle size.
| I | : The image associated to the display. |
| topLeft | : Top-left corner of the rectangle. |
| width,height | : Rectangle size. |
| color | : Rectangle color. |
| fill | : When set to true fill the rectangle. When vpDisplayOpenCV is used, and color alpha channel is set, filling feature can handle transparency. See vpColor header class documentation. |
| thickness | : Thickness of the four lines used to display the rectangle. This parameter is only useful when fill is set to false. |
Definition at line 629 of file vpDisplay_uchar.cpp.
Referenced by vpDot2::searchDotsInArea(), and vpMeNurbs::seekExtremitiesCanny().
|
static |
Display a rectangle with topLeft as the top-left corner and width and height the rectangle size.
| I | : The image associated to the display. |
| rectangle | : Rectangle characteristics. |
| color | : Rectangle color. |
| fill | : When set to true fill the rectangle. When vpDisplayOpenCV is used, and color alpha channel is set, filling feature can handle transparency. See vpColor header class documentation. |
| thickness | : Thickness of the four lines used to display the rectangle. This parameter is only useful when fill is set to false. |
Definition at line 670 of file vpDisplay_uchar.cpp.
|
static |
Display a rectangle with (i,j) as the top-left corner and width and height the rectangle size.
| I | : The image associated to the display. |
| i,j | : Top-left corner of the rectangle. |
| width,height | : Rectangle size. |
| color | : Rectangle color. |
| fill | : When set to true fill the rectangle. |
| thickness | : Thickness of the four lines used to display the rectangle. This parameter is only useful when fill is set to false. |
Definition at line 649 of file vpDisplay_uchar.cpp.
|
static |
Display a rectangle defined by its center, its orientation (angle) and its size.
| I | : Image associated to the display. |
| i,j | : Rectangle center point. |
| angle | : Angle in radians width an horizontal axis oriented from left to right. |
| width,height | : Rectangle size. |
| color | : Rectangle color. |
| thickness | : Thickness of the four lines used to display the rectangle. |
Definition at line 731 of file vpDisplay_uchar.cpp.
|
static |
Display a rectangle defined by its center, its orientation (angle) and its size.
| I | : Image associated to the display. |
| center | : Rectangle center point. |
| angle | : Angle in radians width an horizontal axis oriented from left to right. |
| width,height | : Rectangle size. |
| color | : Rectangle color. |
| thickness | : Thickness of the four lines used to display the rectangle. |
Definition at line 690 of file vpDisplay_rgba.cpp.
|
static |
Display a rectangle with topLeft as the top-left corner and width and height the rectangle size.
| I | : The image associated to the display. |
| topLeft | : Top-left corner of the rectangle. |
| bottomRight | : Bottom-right corner of the rectangle. |
| color | : Rectangle color. |
| fill | : When set to true fill the rectangle. When vpDisplayOpenCV is used, and color alpha channel is set, filling feature can handle transparency. See vpColor header class documentation. |
| thickness | : Thickness of the four lines used to display the rectangle. This parameter is only useful when fill is set to false. |
Definition at line 712 of file vpDisplay_rgba.cpp.
|
static |
Display a rectangle with topLeft as the top-left corner and width and height the rectangle size.
| I | : The image associated to the display. |
| topLeft | : Top-left corner of the rectangle. |
| width,height | : Rectangle size. |
| color | : Rectangle color. |
| fill | : When set to true fill the rectangle. When vpDisplayOpenCV is used, and color alpha channel is set, filling feature can handle transparency. See vpColor header class documentation. |
| thickness | : Thickness of the four lines used to display the rectangle. This parameter is only useful when fill is set to false. |
Definition at line 630 of file vpDisplay_rgba.cpp.
|
static |
Display a rectangle with topLeft as the top-left corner and width and height the rectangle size.
| I | : The image associated to the display. |
| rectangle | : Rectangle characteristics. |
| color | : Rectangle color. |
| fill | : When set to true fill the rectangle. When vpDisplayOpenCV is used, and color alpha channel is set, filling feature can handle transparency. See vpColor header class documentation. |
| thickness | : Thickness of the four lines used to display the rectangle. This parameter is only useful when fill is set to false. |
Definition at line 671 of file vpDisplay_rgba.cpp.
|
static |
Display a rectangle with (i,j) as the top-left corner and width and height the rectangle size.
| I | : The image associated to the display. |
| i,j | : Top-left corner of the rectangle. |
| width,height | : Rectangle size. |
| color | : Rectangle color. |
| fill | : When set to true fill the rectangle. |
| thickness | : Thickness of the four lines used to display the rectangle. This parameter is only useful when fill is set to false. |
Definition at line 650 of file vpDisplay_rgba.cpp.
|
static |
Display a rectangle defined by its center, its orientation (angle) and its size.
| I | : Image associated to the display. |
| i,j | : Rectangle center point. |
| angle | : Angle in radians width an horizontal axis oriented from left to right. |
| width,height | : Rectangle size. |
| color | : Rectangle color. |
| thickness | : Thickness of the four lines used to display the rectangle. |
Definition at line 731 of file vpDisplay_rgba.cpp.
Update the display with the content of the image that is in the region of interest.
| I | : Image. |
| roi | : Region of interest. |
Definition at line 831 of file vpDisplay_uchar.cpp.
Update the display with the content of the image that is in the region of interest.
| I | : Image. |
| roi | : Region of interest. |
Definition at line 831 of file vpDisplay_rgba.cpp.
|
static |
Display a string at the image point ip location.
To select the font used to display the string, use setFont().
| I | : Image associated to the display. |
| ip | : Upper left image point location of the string in the display. |
| s | : String to display in overlay. |
| color | : String color. |
Definition at line 749 of file vpDisplay_uchar.cpp.
Referenced by vpKltOpencv::display(), vpMbEdgeKltTracker::display(), vpMbKltTracker::display(), drawingHelpers::display(), vpMbtDistanceKltCylinder::displayPrimitive(), vpMbtDistanceKltPoints::displayPrimitive(), vpMbTracker::initClick(), vpMbGenericTracker::initFromPose(), vpImageQueue< Type >::record(), and drawingHelpers::waitForClick().
|
static |
Display a string at the image point (i,j) location.
To select the font used to display the string, use setFont().
| I | : Image associated to the display. |
| i,j | : Upper left image point location of the string in the display. |
| s | : String to display in overlay. |
| color | : String color. |
Definition at line 767 of file vpDisplay_uchar.cpp.
|
static |
Display a string at the image point ip location.
To select the font used to display the string, use setFont().
| I | : Image associated to the display. |
| ip | : Upper left image point location of the string in the display. |
| s | : String to display in overlay. |
| color | : String color. |
Definition at line 749 of file vpDisplay_rgba.cpp.
|
static |
Display a string at the image point (i,j) location.
To select the font used to display the string, use setFont().
| I | : Image associated to the display. |
| i,j | : Upper left image point location of the string in the display. |
| s | : String to display in overlay. |
| color | : String color. |
Definition at line 767 of file vpDisplay_rgba.cpp.
|
static |
Flushes the output buffer associated to image I display. It's necessary to use this function to see the results of any drawing.
Definition at line 801 of file vpDisplay_uchar.cpp.
Referenced by vpMbtDistanceCylinder::computeInteractionMatrixError(), vpDot2::defineDots(), drawingHelpers::display(), vpMbtDistanceCircle::displayMovingEdges(), vpTemplateTrackerZone::initClick(), vpPolygon::initClick(), vpMbTracker::initClick(), vpMbGenericTracker::initFromPose(), vpMeLine::initTracking(), vpMeNurbs::initTracking(), vpMeEllipse::initTracking(), vpDot2::searchDotsInArea(), vpMbDepthDenseTracker::segmentPointCloud(), vpMbDepthNormalTracker::segmentPointCloud(), vpSimulatorAfma6::setPosition(), vpMeEllipse::track(), vpMeLine::track(), vpDot2::trackAndDisplay(), vpSimulatorAfma6::updateArticularPosition(), vpSimulatorViper850::updateArticularPosition(), and drawingHelpers::waitForClick().
Flushes the output buffer associated to image I display. It's necessary to use this function to see the results of any drawing.
Definition at line 801 of file vpDisplay_rgba.cpp.
Flushes the output buffer associated to image I display. It's necessary to use this function to see the results of any drawing.
Definition at line 812 of file vpDisplay_uchar.cpp.
Flushes the output buffer associated to image I display. It's necessary to use this function to see the results of any drawing.
Definition at line 812 of file vpDisplay_rgba.cpp.
|
static |
Wait for a click from one of the mouse button.
| I | [in] : The displayed image. |
| blocking | [in] : Blocking behavior.
|
Definition at line 850 of file vpDisplay_uchar.cpp.
Referenced by vpDot2::defineDots(), drawingHelpers::display(), getClick(), vpPlot::getPixelValue(), vpTemplateTrackerZone::initClick(), vpPolygon::initClick(), vpMbTracker::initClick(), vpMbGenericTracker::initFromPose(), vpDot::initTracking(), vpMeLine::initTracking(), vpMeNurbs::initTracking(), vpMeEllipse::initTracking(), vpDot2::initTracking(), vpWireFrameSimulator::navigation(), vpImageQueue< Type >::record(), vpMeEllipse::track(), and drawingHelpers::waitForClick().
|
static |
Wait for a click from one of the mouse button and get the position of the clicked image point.
| I | [in] : The displayed image. |
| ip | [out] : The coordinates of the clicked image point. |
| blocking | [in] : Blocking behavior.
|
Definition at line 870 of file vpDisplay_uchar.cpp.
|
static |
Wait for a mouse button click and get the position of the clicked image point. The button used to click is also set.
| I | [in] : The displayed image. |
| ip | [out] : The coordinates of the clicked image point. |
| button | [out] : The button used to click. |
| blocking | [in] :
|
Definition at line 895 of file vpDisplay_uchar.cpp.
|
static |
Wait for a mouse button click and get the position of the clicked image point. The button used to click is also set.
| I | [in] : The displayed image. |
| button | [out] : The button used to click. |
| blocking | [in] :
|
Definition at line 917 of file vpDisplay_uchar.cpp.
References getClick().
Wait for a click from one of the mouse button.
| I | [in] : The displayed image. |
| blocking | [in] : Blocking behavior.
|
Definition at line 850 of file vpDisplay_rgba.cpp.
|
static |
Wait for a click from one of the mouse button and get the position of the clicked image point.
| I | [in] : The displayed image. |
| ip | [out] : The coordinates of the clicked image point. |
| blocking | [in] : Blocking behavior.
|
Definition at line 870 of file vpDisplay_rgba.cpp.
|
static |
Wait for a mouse button click and get the position of the clicked image point. The button used to click is also set.
| I | [in] : The displayed image. |
| ip | [out] : The coordinates of the clicked image point. |
| button | [out] : The button used to click. |
| blocking | [in] :
|
Definition at line 895 of file vpDisplay_rgba.cpp.
|
static |
Wait for a mouse button click and get the position of the clicked image point. The button used to click is also set.
| I | [in] : The displayed image. |
| button | [out] : The button used to click. |
| blocking | [in] :
|
Definition at line 917 of file vpDisplay_rgba.cpp.
References getClick().
|
static |
Wait for a mouse button click release and get the position of the clicked image point. The button used to click is also set.
| I | [in] : The displayed image. |
| ip | [out] : The coordinates of the clicked image point. |
| button | [out] : The clicked button. |
| blocking | [in] :
|
Definition at line 943 of file vpDisplay_uchar.cpp.
Referenced by getClickUp(), and vpWireFrameSimulator::navigation().
|
static |
Wait for a mouse button click release and get the position of the clicked image point. The button used to click is also set.
| I | [in] : The displayed image. |
| button | [out] : The clicked button. |
| blocking | [in] :
|
Definition at line 965 of file vpDisplay_uchar.cpp.
References getClickUp().
|
static |
Wait for a mouse button click release and get the position of the clicked image point. The button used to click is also set.
| I | [in] : The displayed image. |
| ip | [out] : The coordinates of the clicked image point. |
| button | [out] : The clicked button. |
| blocking | [in] :
|
Definition at line 943 of file vpDisplay_rgba.cpp.
|
static |
Wait for a mouse button click release and get the position of the clicked image point. The button used to click is also set.
| I | [in] : The displayed image. |
| button | [out] : The clicked button. |
| blocking | [in] :
|
Definition at line 965 of file vpDisplay_rgba.cpp.
References getClickUp().
|
inline |
Return the value of the down scale factor applied to the image in order to reduce the size of the window used to display the image.
Definition at line 231 of file vpDisplay.h.
Referenced by vpImageQueue< Type >::record().
|
static |
Return the value of the down scale factor applied to the image in order to reduce the size of the window used to display the image. When display is not initialized, returns 1.
| I | : Image associated to the display window. |
Definition at line 1335 of file vpDisplay_uchar.cpp.
Return the value of the down scale factor applied to the image in order to reduce the size of the window used to display the image. When display is not initialized, returns 1.
| I | : Image associated to the display window. |
Definition at line 1328 of file vpDisplay_rgba.cpp.
|
inline |
Return the display height.
Definition at line 236 of file vpDisplay.h.
|
static |
Get the window pixmap and put it in vpRGBa image.
The code below shows how to use this method.
Definition at line 138 of file vpDisplay.cpp.
References vpImageConvert::convert(), and vpImage< Type >::display.
Referenced by getImage().
Get the window pixmap and put it in vpRGBa image.
The code below shows how to use this method.
Definition at line 212 of file vpDisplay.cpp.
References vpImage< Type >::display, and getImage().
|
static |
Get a keyboard event.
| I | [in] : The displayed image. |
| blocking | [in] : Blocking behavior.
|
Below you will find an example showing how to use this method.
Definition at line 1054 of file vpDisplay_uchar.cpp.
|
static |
Get a keyboard event.
| I | [in] : The displayed image. |
| blocking | [in] : Blocking behavior.
|
| key | [out]: If possible, an ISO Latin-1 character corresponding to the keyboard key. |
Below you will find an example showing how to use this method.
Definition at line 1236 of file vpDisplay_uchar.cpp.
|
static |
Get a keyboard event.
| I | [in] : The displayed image. |
| blocking | [in] : Blocking behavior.
|
| key | [out]: If possible, an ISO Latin-1 character corresponding to the keyboard key. |
Below you will find an example showing how to use this method.
Definition at line 1145 of file vpDisplay_uchar.cpp.
Get a keyboard event.
| I | [in] : The displayed image. |
| blocking | [in] : Blocking behavior.
|
Below you will find an example showing how to use this method.
Definition at line 1053 of file vpDisplay_rgba.cpp.
|
static |
Get a keyboard event.
| I | [in] : The displayed image. |
| blocking | [in] : Blocking behavior.
|
| key | [out]: If possible, an ISO Latin-1 character corresponding to the keyboard key. |
Below you will find an example showing how to use this method.
Definition at line 1235 of file vpDisplay_rgba.cpp.
|
static |
Get a keyboard event.
| I | [in] : The displayed image. |
| blocking | [in] : Blocking behavior.
|
| key | [out]: If possible, an ISO Latin-1 character corresponding to the keyboard key. |
Below you will find an example showing how to use this method.
Definition at line 1144 of file vpDisplay_rgba.cpp.
|
static |
Get the coordinates of the mouse pointer.
| I | [in] : The displayed image. |
| ip | [out] : The coordinates of the mouse pointer. |
Definition at line 1250 of file vpDisplay_uchar.cpp.
|
static |
Get the coordinates of the mouse pointer.
| I | [in] : The displayed image. |
| ip | [out] : The coordinates of the mouse pointer. |
Definition at line 1249 of file vpDisplay_rgba.cpp.
|
static |
Get the coordinates of the mouse pointer.
| I | [in] : The displayed image. |
| ip | [out] : The coordinates of the mouse pointer. |
Definition at line 1264 of file vpDisplay_uchar.cpp.
Referenced by vpPlot::getPixelValue(), vpPlot::navigate(), and vpWireFrameSimulator::navigation().
|
static |
Get the coordinates of the mouse pointer.
| I | [in] : The displayed image. |
| ip | [out] : The coordinates of the mouse pointer. |
Definition at line 1263 of file vpDisplay_rgba.cpp.
|
inline |
|
inline |
Return the position (along the horizontal axis) on the screen of the display window.
Definition at line 247 of file vpDisplay.h.
Referenced by vpMbTracker::initClick().
|
inline |
Return the position (along the vertical axis) on the screen of the display window.
Definition at line 252 of file vpDisplay.h.
Referenced by vpMbTracker::initClick().
|
inline |
Check if the display has been initialised.
Definition at line 259 of file vpDisplay.h.
Referenced by drawingHelpers::display().
Set the window background.
| I | : Image associated to the display window. |
| color | Background color. |
| vpDisplayException::notInitializedError | : If the video device is not initialized. |
Definition at line 1278 of file vpDisplay_uchar.cpp.
Set the window background.
| I | : Image associated to the display window. |
| color | Background color. |
| vpDisplayException::notInitializedError | : If the video device is not initialized. |
Definition at line 1277 of file vpDisplay_rgba.cpp.
|
virtual |
Set the down scale factor applied to the image in order to reduce the display size.
| scale | : Scale factor applied to display a rescaled image. |
Reimplemented in vpDisplayWin32.
Definition at line 227 of file vpDisplay.cpp.
References m_displayHasBeenInitialized, and m_scale.
Referenced by setScale().
|
virtual |
Set the down scaling factor either in auto mode or set manually.
This method has to be called before display initialization.
Reimplemented in vpDisplayWin32.
Definition at line 325 of file vpDisplay.cpp.
References m_displayHasBeenInitialized, and m_scaleType.
|
static |
Set the font of a text printed in the display overlay. To print a text you may use displayText().
| I | : Image associated to the display window. |
| fontname | : The expected font name. |
Definition at line 1296 of file vpDisplay_uchar.cpp.
Referenced by vpPlot::setFont().
Set the font of a text printed in the display overlay. To print a text you may use displayText().
| I | : Image associated to the display window. |
| fontname | : The expected font name. |
Definition at line 1292 of file vpDisplay_rgba.cpp.
|
protected |
Set the down scaling factor either in auto mode or set manually.
Definition at line 256 of file vpDisplay.cpp.
References computeAutoScale(), SCALE_1, SCALE_10, SCALE_2, SCALE_3, SCALE_4, SCALE_5, SCALE_6, SCALE_7, SCALE_8, SCALE_9, SCALE_AUTO, SCALE_DEFAULT, and setDownScalingFactor().
Referenced by vpDisplayGTK::init(), vpDisplayX::init(), vpDisplayOpenCV::init(), vpDisplayWin32::init(), vpDisplayWin32::setDownScalingFactor(), vpDisplayGDI::vpDisplayGDI(), vpDisplayGTK::vpDisplayGTK(), vpDisplayOpenCV::vpDisplayOpenCV(), and vpDisplayX::vpDisplayX().
|
static |
Set the windows title.
| I | : Image associated to the display window. |
| windowtitle | : Window title. |
Definition at line 1308 of file vpDisplay_uchar.cpp.
Referenced by drawingHelpers::display().
Set the windows title.
| I | : Image associated to the display window. |
| windowtitle | : Window title. |
Definition at line 1301 of file vpDisplay_rgba.cpp.
|
static |
Set the window position in the screen.
| I | : Image associated to the display window. |
| winx,winy | : Position of the upper-left window's border in the screen. |
| vpDisplayException::notInitializedError | : If the video device is not initialized. |
Definition at line 1323 of file vpDisplay_uchar.cpp.
Set the window position in the screen.
| I | : Image associated to the display window. |
| winx,winy | : Position of the upper-left window's border in the screen. |
| vpDisplayException::notInitializedError | : If the video device is not initialized. |
Definition at line 1316 of file vpDisplay_rgba.cpp.
|
protected |
display has been initialized
Definition at line 206 of file vpDisplay.h.
Referenced by vpDisplayX::clearDisplay(), vpDisplayGTK::closeDisplay(), vpDisplayOpenCV::closeDisplay(), vpDisplayWin32::closeDisplay(), vpDisplayX::closeDisplay(), vpDisplayGTK::displayArrow(), vpDisplayOpenCV::displayArrow(), vpDisplayX::displayArrow(), vpDisplayGTK::displayCircle(), vpDisplayOpenCV::displayCircle(), vpDisplayX::displayCircle(), vpDisplayGTK::displayCross(), vpDisplayOpenCV::displayCross(), vpDisplayX::displayCross(), vpDisplayGTK::displayDotLine(), vpDisplayOpenCV::displayDotLine(), vpDisplayX::displayDotLine(), vpDisplayGTK::displayImage(), vpDisplayOpenCV::displayImage(), vpDisplayX::displayImage(), vpDisplayGTK::displayImageROI(), vpDisplayOpenCV::displayImageROI(), vpDisplayX::displayImageROI(), vpDisplayGTK::displayLine(), vpDisplayOpenCV::displayLine(), vpDisplayX::displayLine(), vpDisplayGTK::displayPoint(), vpDisplayOpenCV::displayPoint(), vpDisplayX::displayPoint(), vpDisplayGTK::displayRectangle(), vpDisplayOpenCV::displayRectangle(), vpDisplayX::displayRectangle(), vpDisplayGTK::displayText(), vpDisplayOpenCV::displayText(), vpDisplayX::displayText(), vpDisplayGTK::flushDisplay(), vpDisplayOpenCV::flushDisplay(), vpDisplayX::flushDisplay(), vpDisplayGTK::flushDisplayROI(), vpDisplayOpenCV::flushDisplayROI(), vpDisplayX::flushDisplayROI(), vpDisplayGTK::getClick(), vpDisplayOpenCV::getClick(), vpDisplayX::getClick(), vpDisplayGTK::getClickUp(), vpDisplayOpenCV::getClickUp(), vpDisplayX::getClickUp(), vpDisplayGTK::getImage(), vpDisplayX::getImage(), vpDisplayGTK::getKeyboardEvent(), vpDisplayOpenCV::getKeyboardEvent(), vpDisplayX::getKeyboardEvent(), vpDisplayGTK::getPointerMotionEvent(), vpDisplayOpenCV::getPointerMotionEvent(), vpDisplayX::getPointerMotionEvent(), vpDisplayGTK::getPointerPosition(), vpDisplayOpenCV::getPointerPosition(), vpDisplayX::getPointerPosition(), vpDisplayGTK::getScreenSize(), vpDisplayWin32::init(), vpDisplayGTK::init(), vpDisplayX::init(), vpDisplayOpenCV::init(), setDownScalingFactor(), vpDisplayX::setFont(), vpDisplayX::setTitle(), vpDisplayGTK::setTitle(), vpDisplayGTK::setWindowPosition(), vpDisplayX::setWindowPosition(), vpDisplayOpenCV::setWindowPosition(), and ~vpDisplay().
|
protected |
Definition at line 212 of file vpDisplay.h.
Referenced by vpDisplayX::clearDisplay(), vpDisplayGTK::displayImage(), vpDisplayOpenCV::displayImage(), vpDisplayX::displayImage(), vpDisplayOpenCV::displayImageROI(), vpDisplayX::displayImageROI(), vpDisplayGTK::getImage(), vpDisplayX::getImage(), vpDisplayOpenCV::init(), vpDisplayGTK::init(), and vpDisplayX::init().
|
protected |
Definition at line 214 of file vpDisplay.h.
Referenced by vpDisplayGTK::displayCircle(), vpDisplayOpenCV::displayCircle(), vpDisplayX::displayCircle(), vpDisplayGTK::displayDotLine(), vpDisplayOpenCV::displayDotLine(), vpDisplayX::displayDotLine(), vpDisplayGTK::displayImage(), vpDisplayOpenCV::displayImage(), vpDisplayX::displayImage(), vpDisplayGTK::displayImageROI(), vpDisplayOpenCV::displayImageROI(), vpDisplayX::displayImageROI(), vpDisplayGTK::displayLine(), vpDisplayOpenCV::displayLine(), vpDisplayX::displayLine(), vpDisplayGTK::displayPoint(), vpDisplayOpenCV::displayPoint(), vpDisplayWin32::displayPoint(), vpDisplayX::displayPoint(), vpDisplayGTK::displayRectangle(), vpDisplayOpenCV::displayRectangle(), vpDisplayX::displayRectangle(), vpDisplayGTK::displayText(), vpDisplayOpenCV::displayText(), vpDisplayX::displayText(), vpDisplayX::flushDisplayROI(), vpDisplayGTK::getClick(), vpDisplayX::getClick(), vpDisplayOpenCV::getClick(), vpDisplayWin32::getClick(), vpDisplayGTK::getClickUp(), vpDisplayOpenCV::getClickUp(), vpDisplayWin32::getClickUp(), vpDisplayX::getClickUp(), vpDisplayGTK::getPointerMotionEvent(), vpDisplayOpenCV::getPointerMotionEvent(), vpDisplayWin32::getPointerMotionEvent(), vpDisplayX::getPointerMotionEvent(), vpDisplayGTK::getPointerPosition(), vpDisplayOpenCV::getPointerPosition(), vpDisplayWin32::getPointerPosition(), vpDisplayX::getPointerPosition(), vpDisplayOpenCV::init(), vpDisplayGTK::init(), vpDisplayX::init(), vpDisplayWin32::init(), and setDownScalingFactor().
|
protected |
Definition at line 215 of file vpDisplay.h.
Referenced by vpDisplayGTK::init(), vpDisplayX::init(), vpDisplayOpenCV::init(), vpDisplayWin32::init(), and setDownScalingFactor().
|
protected |
Definition at line 213 of file vpDisplay.h.
Referenced by vpDisplayOpenCV::closeDisplay(), vpDisplayOpenCV::flushDisplay(), vpDisplayOpenCV::flushDisplayROI(), vpDisplayOpenCV::init(), vpDisplayWin32::init(), vpDisplayGTK::init(), vpDisplayX::init(), vpDisplayX::setTitle(), vpDisplayGTK::setTitle(), vpDisplayOpenCV::setWindowPosition(), vpDisplayGDI::vpDisplayGDI(), vpDisplayGTK::vpDisplayGTK(), vpDisplayOpenCV::vpDisplayOpenCV(), and vpDisplayX::vpDisplayX().
|
protected |
Definition at line 211 of file vpDisplay.h.
Referenced by vpDisplayX::clearDisplay(), vpDisplayGTK::displayImage(), vpDisplayOpenCV::displayImage(), vpDisplayX::displayImage(), vpDisplayOpenCV::displayImageROI(), vpDisplayX::displayImageROI(), vpDisplayGTK::getImage(), vpDisplayX::getImage(), vpDisplayOpenCV::init(), vpDisplayGTK::init(), and vpDisplayX::init().
|
protected |
display position
Definition at line 208 of file vpDisplay.h.
Referenced by vpDisplayOpenCV::init(), vpDisplayWin32::init(), vpDisplayGTK::init(), vpDisplayX::init(), vpDisplayOpenCV::setWindowPosition(), vpDisplayGDI::vpDisplayGDI(), vpDisplayGTK::vpDisplayGTK(), vpDisplayOpenCV::vpDisplayOpenCV(), and vpDisplayX::vpDisplayX().
|
protected |
display position
Definition at line 210 of file vpDisplay.h.
Referenced by vpDisplayOpenCV::init(), vpDisplayWin32::init(), vpDisplayGTK::init(), vpDisplayX::init(), vpDisplayOpenCV::setWindowPosition(), vpDisplayGDI::vpDisplayGDI(), vpDisplayGTK::vpDisplayGTK(), vpDisplayOpenCV::vpDisplayOpenCV(), and vpDisplayX::vpDisplayX().
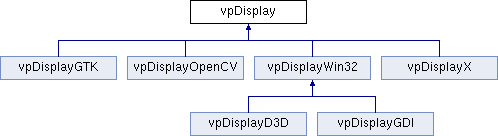
 where
where  are the centered moments and a the area) expressed in pixels.
are the centered moments and a the area) expressed in pixels.