|
Visual Servoing Platform
version 3.1.0
|
|
Visual Servoing Platform
version 3.1.0
|
ViSP [28] is a modular C++ library that allows fast development of visual servoing applications. ViSP is developed and maintained by the Inria Lagadic team located at Inria Rennes.
ViSP official site is https://visp.inria.fr
ViSP wiki is https://github.com/lagadic/visp/wiki
ViSP source code available on GitHub https://github.com/lagadic/visp
If you have any problems or find any bugs, please report them in the bug tracker. If you may need help, please use the available forums.
It is also possible to contact ViSP main developers using: visp@inria.fr
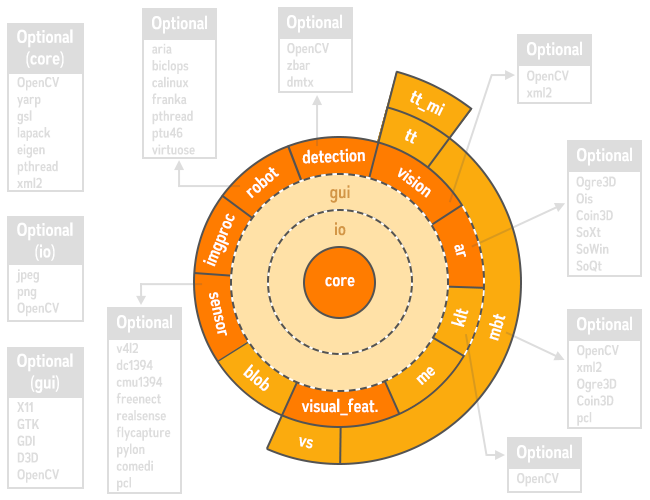
Since ViSP 3.0.0, we design a new modular software architecture where ViSP capabilities are grouped in several modules (core, io, gui, vision, …). In ViSP 3.1.0 we introduced a new module called imgproc. As a result, the user will find several shared or static libraries, one for each module. The following figure highlights the module dependencies and the third-party libraries that may be used by each module. The central module is the core module. All other modules depend on core.
From https://visp.inria.fr/download you can either download the latest stable release, a daily snapshot or the current development distribution using git.
Because ViSP is a multi platform library that works under Linux, OSX and Windows, to install ViSP you need the CMake configuration tool available from http://www.cmake.org. Furthermore, depending on your operation system and the capabilities (framegrabber, display, simulation, ...) you need, prior to install ViSP you may install third party libraries https://visp.inria.fr/software-architecture.
ViSP full installation procedure using CMake is detailed in the Installation from prebuild SDK tutorials and Installation from source tutorials. Getting started tutorials and documents in pdf are also available from https://visp.inria.fr/publications.
Here after you will find a list of tutorials that show the basic use of ViSP classes with a small first code.
ViSP C++ classes are organized in modules that may help the user during his project implementation.
From the example page, you will also find examples showing how to use the library to acquire and display an image, compute a camera pose, estimate an homography, servo a real robot or a simulated one using a 2D, 2D half or 3D visual servoing scheme, ...
ViSP library is an open source C++ library which is developed at Inria by Lagadic team. If you enjoy using ViSP, you may contribute to the project in different ways. This will motivate us to continue the efforts.
You can also ask for help using either the french or the english forum.
 1.8.13
1.8.13