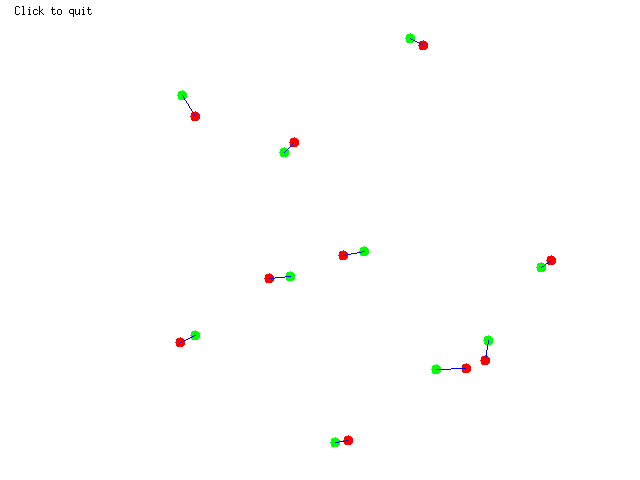
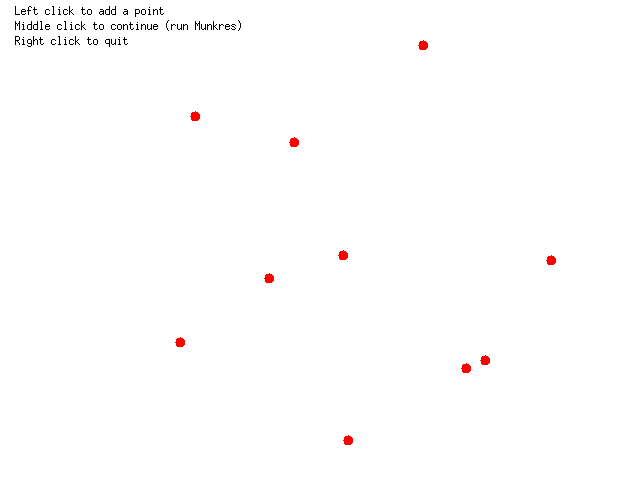
For example, it can be used to match tracked (red) and detected (green) image points:
#include <functional>
#include <visp3/core/vpConfig.h>
#include <visp3/gui/vpDisplayD3D.h>
#include <visp3/gui/vpDisplayGDI.h>
#include <visp3/gui/vpDisplayGTK.h>
#include <visp3/gui/vpDisplayOpenCV.h>
#include <visp3/gui/vpDisplayX.h>
#include <visp3/core/vpColor.h>
#include <visp3/core/vpMunkres.h>
#include <visp3/core/vpUniRand.h>
int main()
{
#if ((__cplusplus >= 201703L) || (defined(_MSVC_LANG) && (_MSVC_LANG >= 201703L)))
#if defined(VISP_HAVE_DISPLAY)
#ifdef ENABLE_VISP_NAMESPACE
#endif
std::vector<vpImagePoint> rand_ips {};
while (rand_ips.size() < 10) {
rand_ips.emplace_back(rand.uniform(10, I.
getHeight() - 10), rand.uniform(10, I.
getWidth() - 10));
}
try {
#if defined(VISP_HAVE_X11)
vpDisplayX d(I, disp_scale_type);
#elif defined(VISP_HAVE_GDI)
#elif defined(HAVE_OPENCV_HIGHGUI)
#elif defined(VISP_HAVE_GTK)
#elif defined(VISP_HAVE_D3D9)
#else
std::cout << "No image viewer is available..." << std::endl;
#endif
};
auto disp_lane { 0 };
std::for_each(begin(rand_ips), end(rand_ips), std::bind(display_point, std::placeholders::_1,
vpColor::red));
std::vector<vpImagePoint> user_ips {};
user_ips.push_back(ip);
}
return EXIT_SUCCESS;
}
std::for_each(begin(user_ips), end(user_ips), std::bind(display_point, std::placeholders::_1,
vpColor::green));
}
std::vector<std::vector<double> > cost_matrix(rand_ips.size(), std::vector<double>(user_ips.size()));
for (auto i = 0u; i < rand_ips.size(); i++) {
for (auto j = 0u; j < user_ips.size(); j++) {
}
}
std::for_each(begin(rand_ips), end(rand_ips), std::bind(display_point, std::placeholders::_1,
vpColor::red));
std::for_each(begin(user_ips), end(user_ips), std::bind(display_point, std::placeholders::_1,
vpColor::green));
for (const auto &[i, j] : vpMunkres::run(cost_matrix)) {
}
}
std::cout << "Catch an exception: " << e << std::endl;
}
#endif
#endif
return EXIT_SUCCESS;
}
Class to define RGB colors available for display functionalities.
static const vpColor blue
static const vpColor black
static const vpColor green
Display for windows using Direct3D 3rd party. Thus to enable this class Direct3D should be installed....
Display for windows using GDI (available on any windows 32 platform).
The vpDisplayGTK allows to display image using the GTK 3rd party library. Thus to enable this class G...
The vpDisplayOpenCV allows to display image using the OpenCV library. Thus to enable this class OpenC...
static bool getClick(const vpImage< unsigned char > &I, bool blocking=true)
static void displayCircle(const vpImage< unsigned char > &I, const vpImageCircle &circle, const vpColor &color, bool fill=false, unsigned int thickness=1)
static void display(const vpImage< unsigned char > &I)
static void displayLine(const vpImage< unsigned char > &I, const vpImagePoint &ip1, const vpImagePoint &ip2, const vpColor &color, unsigned int thickness=1, bool segment=true)
static void setTitle(const vpImage< unsigned char > &I, const std::string &windowtitle)
static void flush(const vpImage< unsigned char > &I)
static void displayText(const vpImage< unsigned char > &I, const vpImagePoint &ip, const std::string &s, const vpColor &color)
error that can be emitted by ViSP classes.
Class that defines a 2D point in an image. This class is useful for image processing and stores only ...
static double distance(const vpImagePoint &iP1, const vpImagePoint &iP2)
unsigned int getWidth() const
unsigned int getHeight() const
Class for generating random numbers with uniform probability density.
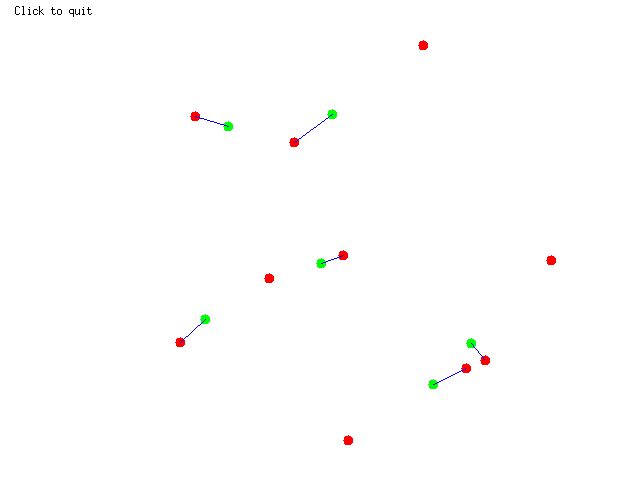
The tutorial starts with 10 random image points (red) which represent our tracked points:
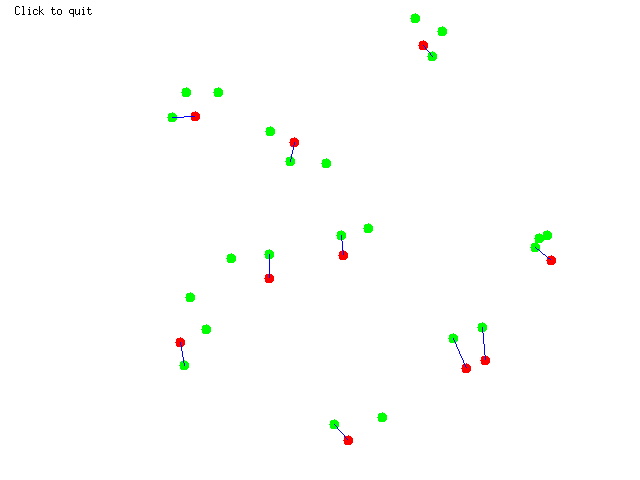
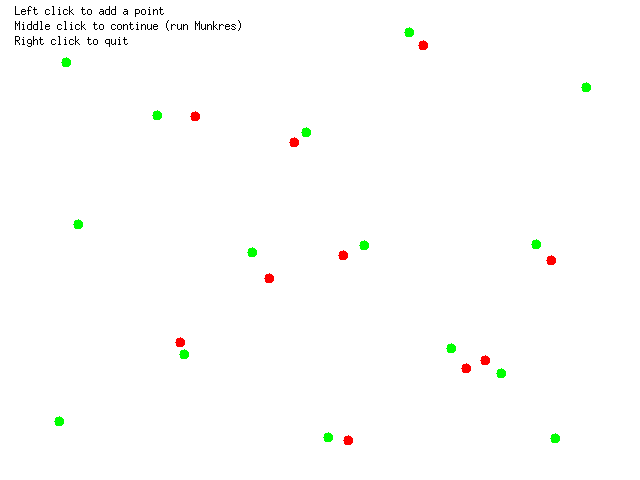
Then, by clicking on the image, the user is able to simulate the detected points (green):
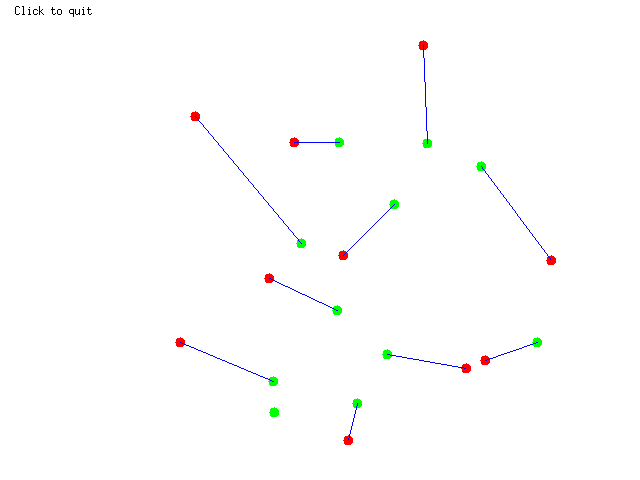
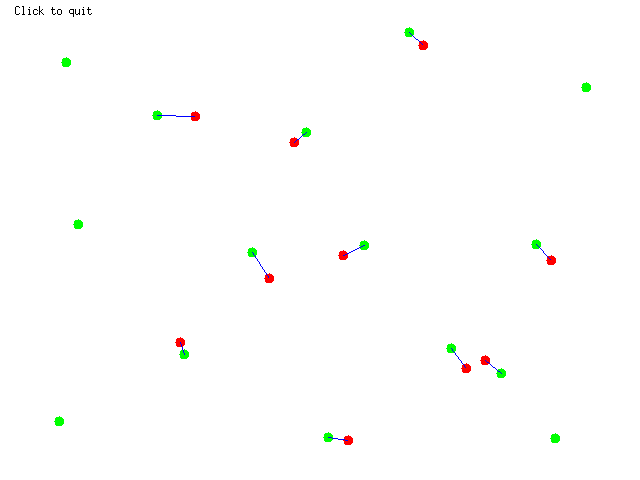
Once the "fake" detection are selected, a cost matrix is built by defining the cost of assigning a track to a detection point as the Euclidean distance between them:
Finally, Munkres is ran to assign tracked points with the detected points (blue lines):