|
Visual Servoing Platform
version 3.6.1 under development (2024-10-01)
|
|
Visual Servoing Platform
version 3.6.1 under development (2024-10-01)
|
#include <visp3/robot/vpRobotMavsdk.h>
Public Member Functions | |
| vpRobotMavsdk () | |
| vpRobotMavsdk (const std::string &connection_info) | |
| virtual | ~vpRobotMavsdk () |
Robot connection | |
| void | connect (const std::string &connection_info) |
General robot information | |
| float | getBatteryLevel () const |
| void | getPosition (float &ned_north, float &ned_east, float &ned_down, float &ned_yaw) const |
| void | getPosition (vpHomogeneousMatrix &ned_M_frd) const |
| std::tuple< float, float > | getHome () const |
| std::string | getAddress () const |
| bool | isRunning () const |
Robot commands | |
| bool | arm () |
| bool | disarm () |
| void | doFlatTrim () |
| bool | hasFlyingCapability () |
| bool | holdPosition () |
| bool | kill () |
| bool | land () |
| bool | releaseControl () |
| bool | sendMocapData (const vpHomogeneousMatrix &enu_M_flu, int display_fps=1) |
| void | setAutoLand (bool auto_land) |
| bool | setForwardSpeed (double body_frd_vx) |
| bool | setLateralSpeed (double body_frd_vy) |
| bool | setGPSGlobalOrigin (double latitude, double longitude, double altitude) |
| void | setPositioningIncertitude (float position_incertitude, float yaw_incertitude) |
| bool | setPosition (float ned_north, float ned_east, float ned_down, float ned_yaw, bool blocking=true, int timeout_sec=10) |
| bool | setPosition (const vpHomogeneousMatrix &ned_M_frd, bool blocking=true, int timeout_sec=10) |
| bool | setPositionRelative (float ned_delta_north, float ned_delta_east, float ned_delta_down, float ned_delta_yaw, bool blocking=true, int timeout_sec=10) |
| bool | setPositionRelative (const vpHomogeneousMatrix &delta_frd_M_frd, bool blocking=true, int timeout_sec=10) |
| bool | setVelocity (const vpColVector &frd_vel_cmd) |
| bool | setVerticalSpeed (double body_frd_vz) |
| bool | setYawSpeed (double body_frd_wz) |
| void | setTakeOffAlt (double altitude) |
| void | setVerbose (bool verbose) |
| bool | stopMoving () |
| bool | takeControl () |
| bool | takeOff (bool interactive=true, int timeout_sec=10, bool use_gps=false) |
| bool | takeOff (bool interactive, double takeoff_altitude, int timeout_sec=10, bool use_gps=false) |
Interface for Mavlink allowing to control drones or rovers using a MavLink compatible controller such a Pixhawk running PX4 or Ardupilot.
This class needs cxx17 or more recent standard enabled during ViSP cmake configuration.
This class is enabled when MavSDK C++ is installed and detected by ViSP during cmake configuration step.
This class was tested to control a quadcopter equipped with a Pixhawk running PX4 firmware connected to a Jetson TX2.
We provide a set of tests if you want to have a try on your flying vehicle:
We provide also this Tutorial: Image-based visual-servoing on a drone equipped with a Pixhawk.
This class was also tested to control an AION ROBOTICS rover equipped with a Pixhawk running Ardupilot firmware directly connected by serial to a laptop running Ubuntu 22.04.
If you want to have a try you may see:
Definition at line 93 of file vpRobotMavsdk.h.
| vpRobotMavsdk::vpRobotMavsdk | ( | ) |
Default constructor without parameters. You need to use the connect() function afterwards.
Set default positioning incertitude to 0.05 meter in translation, and 5 degrees along yaw orientation. These default values are used to determine when a position is reached and could be changed using setPositioningIncertitude(). When the vehicle has flying capabilities, call by default land() in the destructor. This behavior could be changed using setAutoLand().
To control the vehicle using this class, you need to call takeControl() to start the off-board mode with PX4 or the guided mode with Ardupilot. After this call you can call setPosition() to move the vehicle to a desired position and yaw orientation or call setVelocity() to move the vehicle in velocity.
Definition at line 1168 of file vpRobotMavsdk.cpp.
References vpMath::rad().
| BEGIN_VISP_NAMESPACE vpRobotMavsdk::vpRobotMavsdk | ( | const std::string & | connection_info | ) |
Constructor.
Initializes vehicle controller, by discovering vehicles connected either with an Ethernet TCP or UDP link, or with a serial link the computer is currently connected to.
After having called this constructor, it is recommended to check if the vehicle is running with isRunning() before sending commands to the vehicle.
Set default positioning incertitude to 0.05 meter in translation, and 5 degrees along yaw orientation. These default values are used to determine when a position is reached and could be changed using setPositioningIncertitude(). When the vehicle has flying capabilities, call by default land() in the destructor. This behavior could be changed using setAutoLand().
To control the vehicle using this class, you need to call takeControl() to start the off-board mode with PX4 or the guided mode with Ardupilot. After this call you can call setPosition() to move the vehicle to a desired position and yaw orientation or call setVelocity() to move the vehicle in velocity.
| [in] | connection_info | : Specify connection information. This parameter must be written following these conventions:
|
For more information see here.
| vpException::fatalError | : If the program failed to connect to the vehicle. |
Definition at line 1149 of file vpRobotMavsdk.cpp.
References vpMath::rad().
|
virtual |
Destructor. When the vehicle has flying capabilities and when auto land mode is enabled, lands the vehicle if not landed and safely disconnects everything.
Definition at line 1180 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::arm | ( | ) |
Arms the vehicle.
Definition at line 1287 of file vpRobotMavsdk.cpp.
| void vpRobotMavsdk::connect | ( | const std::string & | connection_info | ) |
Connects to the vehicle and setups the different controllers.
| [in] | connection_info | : The connection information given to connect to the vehicle. You may use:
|
For more information see here.
Definition at line 1194 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::disarm | ( | ) |
Disarms the vehicle.
Definition at line 1293 of file vpRobotMavsdk.cpp.
| void vpRobotMavsdk::doFlatTrim | ( | ) |
Sends a flat trim command to the vehicle, to calibrate accelerometer and gyro.
Definition at line 1272 of file vpRobotMavsdk.cpp.
| std::string vpRobotMavsdk::getAddress | ( | ) | const |
Gives the address given to connect to the vehicle.
Definition at line 1232 of file vpRobotMavsdk.cpp.
| float vpRobotMavsdk::getBatteryLevel | ( | ) | const |
Gets current battery level in volts.
Definition at line 1239 of file vpRobotMavsdk.cpp.
| std::tuple< float, float > vpRobotMavsdk::getHome | ( | ) | const |
Gets the robot home position in GPS coord.
Definition at line 1265 of file vpRobotMavsdk.cpp.
| void vpRobotMavsdk::getPosition | ( | float & | ned_north, |
| float & | ned_east, | ||
| float & | ned_down, | ||
| float & | ned_yaw | ||
| ) | const |
Gets the current vehicle FRD position in its local NED frame.
| [in] | ned_north | : Position of the vehicle along NED north axis in [m]. |
| [in] | ned_east | : Position of the vehicle along NED east axis in [m]. |
| [in] | ned_down | : Position of the vehicle along NED down axis in [m]. |
| [in] | ned_yaw | : Yaw angle in [rad] of the vehicle along NED down axis. |
Definition at line 1254 of file vpRobotMavsdk.cpp.
| void vpRobotMavsdk::getPosition | ( | vpHomogeneousMatrix & | ned_M_frd | ) | const |
Gets the current vehicle FRD position in its local NED frame.
| [in] | ned_M_frd | : Homogeneous matrix describing the position and attitude of the vehicle returned by telemetry. |
Definition at line 1245 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::hasFlyingCapability | ( | ) |
Return true if the vehicle has flying capabilities. Ground rover, surface boat and submarine vehicles are considered with non flying capabilities, while all the other vehicles are considered with flying capabilities.
Definition at line 1581 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::holdPosition | ( | ) |
Makes the vehicle hold its position.
Definition at line 1341 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::isRunning | ( | ) | const |
Checks if the vehicle is running, ie if the vehicle is connected and ready to receive commands.
Definition at line 1199 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::kill | ( | ) |
Cuts the motors like a kill switch. Should only be used in emergency cases.
Definition at line 1457 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::land | ( | ) |
Sends landing command if the vehicle has flying capabilities.
Definition at line 1357 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::releaseControl | ( | ) |
Release control allowing running software outside of the autopilot:
Definition at line 1533 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::sendMocapData | ( | const vpHomogeneousMatrix & | enu_M_flu, |
| int | display_fps = 1 |
||
| ) |
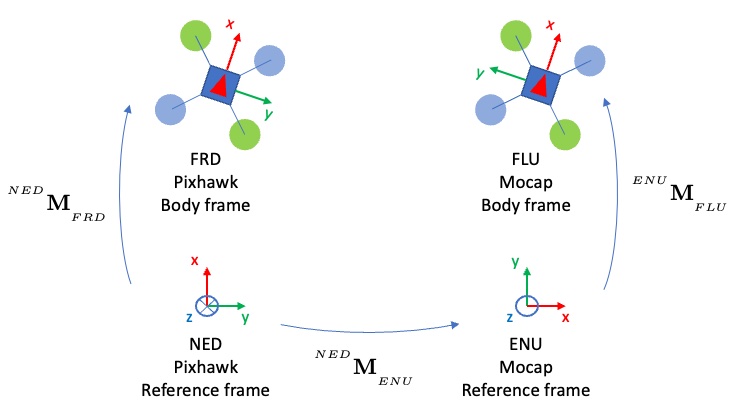
Sends MoCap position data to the vehicle.
We consider here that the MoCap global reference frame is ENU (East-North-Up). The vehicle body frame if FLU (Front-Left-Up) where X axis is aligned with the vehicle front axis and Z axis going upward.
Internally, this pose called enu_M_flu is transformed to match the requirements of the Pixhawk into ned_M_frd corresponding to the FRD (Front-Right-Down) body frame position in the NED (North-East-Down) local reference frame.
| [in] | enu_M_flu | : Homogeneous matrix containing the pose of the vehicle given by the MoCap system. To be more precise, this matrix gives the pose of the vehicle FLU body frame returned by the MoCap where MoCap global reference frame is defined as ENU. |
| [in] | display_fps | : Display ned_M_frd pose internally sent through mavlink at the given framerate. A value of 0 can be used to disable this display. |
Internally we transform this FRD pose in a NED global reference frame as expected by Pixhawk convention.
Definition at line 1221 of file vpRobotMavsdk.cpp.
| void vpRobotMavsdk::setAutoLand | ( | bool | auto_land | ) |
Enable/disable auto land mode in the destructor.
| [in] | auto_land | : When true auto land mode is enabled and the destructor calls land() when the vehicle has flying capabilities. When false the destructor doesn't call land(). |
Definition at line 1542 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::setForwardSpeed | ( | double | body_frd_vx | ) |
Sets the forward speed, expressed in m/s, in the Front-Right-Down body frame.
| [in] | body_frd_vx | : Desired FRD body frame forward speed in m/s.
|
Definition at line 1483 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::setGPSGlobalOrigin | ( | double | latitude, |
| double | longitude, | ||
| double | altitude | ||
| ) |
Allows to set GPS global origin to initialize the Kalman filter when the vehicle is not equipped with a GPS.
| latitude | : Latitude in deg (WGS84). |
| longitude | : Longitude in deg (WGS84). |
| altitude | : Altitude in meter. Positive for up. |
Definition at line 1506 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::setLateralSpeed | ( | double | body_frd_vy | ) |
Sets the lateral speed, expressed in m/s, in the Front-Right-Down body frame.
| [in] | body_frd_vy | : Desired FRD body frame lateral speed in m/s.
|
Definition at line 1496 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::setPosition | ( | const vpHomogeneousMatrix & | ned_M_frd, |
| bool | blocking = true, |
||
| int | timeout_sec = 10 |
||
| ) |
Moves the vehicle Front-Right-Down (FRD) body frame with respect to the global reference NED frame.
| [in] | ned_M_frd | : Homogeneous matrix that express the FRD absolute position to reach by the vehicle expressed in the NED global reference frame. |
| [in] | blocking | : When true this function is blocking until the position is reached. |
| [in] | timeout_sec | : Timeout value in seconds applied when blocking is set to true. |
Definition at line 1395 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::setPosition | ( | float | ned_north, |
| float | ned_east, | ||
| float | ned_down, | ||
| float | ned_yaw, | ||
| bool | blocking = true, |
||
| int | timeout_sec = 10 |
||
| ) |
Moves the vehicle Front-Right-Down (FRD) body frame with respect to the global reference NED frame.
| [in] | ned_north | : Absolute position to reach along north axis (meters). |
| [in] | ned_east | : Absolute position to reach along east axis (meters). |
| [in] | ned_down | : Absolute position to reach along down axis (meters). |
| [in] | ned_yaw | : Absolute position to reach of the heading (radians). |
| [in] | blocking | : When true this function is blocking until the position is reached. |
| [in] | timeout_sec | : Timeout value in seconds applied when blocking is set to true. |
Definition at line 1373 of file vpRobotMavsdk.cpp.
| void vpRobotMavsdk::setPositioningIncertitude | ( | float | position_incertitude, |
| float | yaw_incertitude | ||
| ) |
Incertitude used to decided if a position is reached when using setPosition() and setPositionRelative().
| [in] | position_incertitude | : Position incertitude in [m]. |
| [in] | yaw_incertitude | : Yaw angle incertitude in [rad]. |
Definition at line 1551 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::setPositionRelative | ( | const vpHomogeneousMatrix & | delta_frd_M_frd, |
| bool | blocking = true, |
||
| int | timeout_sec = 10 |
||
| ) |
Moves the vehicle Front-Right-Down (FRD) body frame with respect to the global reference NED frame.
| [in] | delta_frd_M_frd | : Homogeneous matrix that express the FRD absolute position to reach by the vehicle expressed in the NED global reference frame. |
| [in] | blocking | : When true this function is blocking until the position is reached. |
| [in] | timeout_sec | : Timeout value in seconds applied when blocking is set to true. |
Definition at line 1436 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::setPositionRelative | ( | float | ned_delta_north, |
| float | ned_delta_east, | ||
| float | ned_delta_down, | ||
| float | ned_delta_yaw, | ||
| bool | blocking = true, |
||
| int | timeout_sec = 10 |
||
| ) |
Moves the vehicle Front-Right-Down (FRD) body frame with respect to the global reference NED frame.
| [in] | ned_delta_north | : Relative displacement along north (meters). |
| [in] | ned_delta_east | : Relative displacement along east (meters). |
| [in] | ned_delta_down | : Relative displacement along down axis (meters). |
| [in] | ned_delta_yaw | : Relative rotation of the heading (radians). |
| [in] | blocking | : When true this function is blocking until the position is reached. |
| [in] | timeout_sec | : Timeout value in seconds applied when blocking is set to true. |
Definition at line 1414 of file vpRobotMavsdk.cpp.
| void vpRobotMavsdk::setTakeOffAlt | ( | double | altitude | ) |
Sets the take off altitude.
| [in] | altitude | : Desired altitude for take off in meters, equal to 1.0 m by default. |
Definition at line 1281 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::setVelocity | ( | const vpColVector & | frd_vel_cmd | ) |
Sets the vehicle velocity in its own Front-Right-Down (FRD) body frame.
| [in] | frd_vel_cmd | : 4-dim vehicle velocity commands, vx, vy, vz, wz. Translation velocities (vx, vy, vz) should be expressed in m/s and rotation velocity (wz) in rad/s. |
Definition at line 1450 of file vpRobotMavsdk.cpp.
| void vpRobotMavsdk::setVerbose | ( | bool | verbose | ) |
Enable/disable verbose mode.
| [in] | verbose | : When true enable verbose mode. |
Definition at line 1574 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::setVerticalSpeed | ( | double | body_frd_vz | ) |
Sets the vertical speed, expressed in m/s, in the Front-Right-Down body frame.
| [in] | body_frd_vz | : Desired FRD body frame vertical speed in m/s.
|
Definition at line 1567 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::setYawSpeed | ( | double | body_frd_wz | ) |
Sets the yaw speed, expressed in rad/s, in the Front-Right-Down body frame.
| [in] | body_frd_wz | : Desired FRD body frame yaw speed in rad/s.
|
Definition at line 1470 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::stopMoving | ( | ) |
Stops any vehicle movement.
Definition at line 1348 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::takeControl | ( | ) |
Take control using software running outside of the autopilot:
This method should be called before using setPosition(), setVelocity()
Definition at line 1522 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::takeOff | ( | bool | interactive, |
| double | takeoff_altitude, | ||
| int | timeout_sec = 10, |
||
| bool | use_gps = false |
||
| ) |
Sends take off command when the vehicle has flying capabilities.
| [in] | interactive | : If true asks the user if the offboard mode is to be forced through the terminal. If false offboard mode is automatically set. |
| [in] | takeoff_altitude | : Take off altitude in [m]. Should be a positive value. |
| [in] | timeout_sec | : Time out in seconds to achieve takeoff. |
| [in] | use_gps | : When GPS is to use, set this flag to true. Set to false otherwise. |
Definition at line 1328 of file vpRobotMavsdk.cpp.
| bool vpRobotMavsdk::takeOff | ( | bool | interactive = true, |
| int | timeout_sec = 10, |
||
| bool | use_gps = false |
||
| ) |
Sends take off command when the vehicle has flying capabilities.
| [in] | interactive | : If true asks the user if the offboard mode is to be forced through the terminal. If false offboard mode is automatically set. |
| [in] | timeout_sec | : Time out in seconds to achieve takeoff. |
| [in] | use_gps | : When GPS is to use, set this flag to true. Set to false otherwise. |
Definition at line 1309 of file vpRobotMavsdk.cpp.