|
Visual Servoing Platform
version 3.5.0 under development (2022-02-15)
|
|
Visual Servoing Platform
version 3.5.0 under development (2022-02-15)
|
#include <visp3/robot/vpRobotSimulator.h>
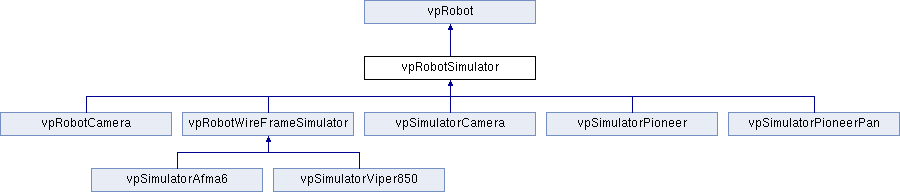
 Inheritance diagram for vpRobotSimulator:
Inheritance diagram for vpRobotSimulator:Public Types | |
| enum | vpRobotStateType { STATE_STOP, STATE_VELOCITY_CONTROL, STATE_POSITION_CONTROL, STATE_ACCELERATION_CONTROL, STATE_FORCE_TORQUE_CONTROL } |
| enum | vpControlFrameType { REFERENCE_FRAME, ARTICULAR_FRAME, JOINT_STATE = ARTICULAR_FRAME, END_EFFECTOR_FRAME, CAMERA_FRAME, TOOL_FRAME = CAMERA_FRAME, MIXT_FRAME } |
Public Member Functions | |
| vpRobotSimulator () | |
| virtual | ~vpRobotSimulator () |
Inherited functionalities from vpRobotSimulator | |
| double | getSamplingTime () const |
| virtual void | setSamplingTime (const double &delta_t) |
Inherited functionalities from vpRobot | |
| virtual void | get_eJe (vpMatrix &_eJe)=0 |
| virtual void | get_fJe (vpMatrix &_fJe)=0 |
| virtual void | getDisplacement (const vpRobot::vpControlFrameType frame, vpColVector &q)=0 |
| double | getMaxTranslationVelocity (void) const |
| double | getMaxRotationVelocity (void) const |
| virtual void | getPosition (const vpRobot::vpControlFrameType frame, vpColVector &q)=0 |
| vpColVector | getPosition (const vpRobot::vpControlFrameType frame) |
| virtual vpRobotStateType | getRobotState (void) const |
| virtual void | init ()=0 |
| void | setMaxRotationVelocity (double maxVr) |
| void | setMaxTranslationVelocity (double maxVt) |
| virtual void | setPosition (const vpRobot::vpControlFrameType frame, const vpColVector &q)=0 |
| virtual vpRobotStateType | setRobotState (const vpRobot::vpRobotStateType newState) |
| virtual void | setVelocity (const vpRobot::vpControlFrameType frame, const vpColVector &vel)=0 |
| void | setVerbose (bool verbose) |
Static Public Member Functions | |
Static Public Member Functions inherited from vpRobot | |
| static vpColVector | saturateVelocities (const vpColVector &v_in, const vpColVector &v_max, bool verbose=false) |
Protected Member Functions | |
Protected Member Functions Inherited from vpRobot | |
| vpControlFrameType | setRobotFrame (vpRobot::vpControlFrameType newFrame) |
| vpControlFrameType | getRobotFrame (void) const |
Protected Attributes | |
| double | delta_t_ |
| double | maxTranslationVelocity |
| double | maxRotationVelocity |
| int | nDof |
| vpMatrix | eJe |
| int | eJeAvailable |
| vpMatrix | fJe |
| int | fJeAvailable |
| int | areJointLimitsAvailable |
| double * | qmin |
| double * | qmax |
| bool | verbose_ |
Static Protected Attributes | |
| static const double | maxTranslationVelocityDefault = 0.2 |
| static const double | maxRotationVelocityDefault = 0.7 |
This class aims to be a basis used to create all the robot simulators.
group_robot_simu_unicycle
Definition at line 62 of file vpRobotSimulator.h.
|
inherited |
Robot control frames.
| Enumerator | |
|---|---|
| REFERENCE_FRAME | Corresponds to a fixed reference frame attached to the robot structure. |
| ARTICULAR_FRAME | Corresponds to the joint state. This value is deprecated. You should rather use vpRobot::JOINT_STATE. |
| JOINT_STATE | Corresponds to the joint state. |
| END_EFFECTOR_FRAME | Corresponds to robot end-effector frame. |
| CAMERA_FRAME | Corresponds to a frame attached to the camera mounted on the robot end-effector. |
| TOOL_FRAME | Corresponds to a frame attached to the tool (camera, gripper...) mounted on the robot end-effector. This value is equal to vpRobot::CAMERA_FRAME. |
| MIXT_FRAME | Corresponds to a "virtual" frame where translations are expressed in the reference frame, and rotations in the camera frame. |
|
inherited |
Robot control states.
| vpRobotSimulator::vpRobotSimulator | ( | ) |
Basic constructor that sets the sampling time by default to 40ms.
Definition at line 46 of file vpRobotSimulator.cpp.
|
inlinevirtual |
Basic destructor
Definition at line 72 of file vpRobotSimulator.h.
|
pure virtualinherited |
Get the robot Jacobian expressed in the end-effector frame.
Implemented in vpRobotViper850, vpRobotViper650, vpRobotFranka, vpRobotAfma6, vpSimulatorViper850, vpRobotAfma4, vpSimulatorAfma6, vpSimulatorPioneerPan, vpSimulatorPioneer, vpRobotCamera, vpSimulatorCamera, vpRobotBiclops, vpRobotFlirPtu, vpRobotKinova, vpRobotPtu46, vpRobotPioneer, and vpRobotTemplate.
Referenced by vpRobotViper650::getControlMode(), vpRobotViper850::getControlMode(), and vpSimulatorViper850::getPositioningVelocity().
|
pure virtualinherited |
Get the robot Jacobian expressed in the robot reference (or world) frame.
Implemented in vpRobotViper850, vpRobotViper650, vpRobotFranka, vpRobotAfma6, vpSimulatorViper850, vpRobotAfma4, vpSimulatorAfma6, vpRobotBiclops, vpRobotFlirPtu, vpRobotKinova, vpRobotPtu46, and vpRobotTemplate.
Referenced by vpRobotPioneer::get_eJe(), vpRobotViper650::getControlMode(), vpRobotViper850::getControlMode(), and vpSimulatorViper850::getPositioningVelocity().
|
pure virtualinherited |
Get a displacement (frame as to ve specified) between two successive position control.
Implemented in vpRobotViper850, vpRobotViper650, vpRobotAfma6, vpSimulatorViper850, vpRobotAfma4, vpSimulatorAfma6, vpRobotFlirPtu, vpRobotKinova, vpRobotBiclops, vpRobotPtu46, and vpRobotTemplate.
Referenced by vpRobotPioneer::get_eJe(), vpRobotTemplate::get_eMc(), vpRobotFlirPtu::get_eMc(), vpRobotViper650::getControlMode(), and vpRobotKinova::getNumDevices().
|
inherited |
Get the maximal rotation velocity that can be sent to the robot during a velocity control.
Definition at line 273 of file vpRobot.cpp.
References vpRobot::maxRotationVelocity.
Referenced by vpSimulatorAfma6::computeArticularVelocity(), vpSimulatorViper850::computeArticularVelocity(), vpSimulatorAfma6::findHighestPositioningSpeed(), vpSimulatorViper850::findHighestPositioningSpeed(), vpSimulatorAfma6::setPosition(), vpRobotTemplate::setVelocity(), vpSimulatorCamera::setVelocity(), vpRobotCamera::setVelocity(), vpSimulatorPioneer::setVelocity(), vpRobotPioneer::setVelocity(), vpSimulatorPioneerPan::setVelocity(), vpRobotKinova::setVelocity(), vpRobotFlirPtu::setVelocity(), vpSimulatorAfma6::setVelocity(), vpSimulatorViper850::setVelocity(), vpRobotAfma4::setVelocity(), vpRobotAfma6::setVelocity(), vpRobotFranka::setVelocity(), vpRobotViper650::setVelocity(), and vpRobotViper850::setVelocity().
|
inherited |
Get the maximal translation velocity that can be sent to the robot during a velocity control.
Definition at line 251 of file vpRobot.cpp.
References vpRobot::maxTranslationVelocity.
Referenced by vpSimulatorAfma6::setPosition(), vpRobotTemplate::setVelocity(), vpSimulatorCamera::setVelocity(), vpRobotCamera::setVelocity(), vpSimulatorPioneer::setVelocity(), vpRobotPioneer::setVelocity(), vpSimulatorPioneerPan::setVelocity(), vpRobotKinova::setVelocity(), vpRobotFlirPtu::setVelocity(), vpSimulatorAfma6::setVelocity(), vpSimulatorViper850::setVelocity(), vpRobotAfma4::setVelocity(), vpRobotAfma6::setVelocity(), vpRobotFranka::setVelocity(), vpRobotViper650::setVelocity(), and vpRobotViper850::setVelocity().
|
pure virtualinherited |
Get the robot position (frame has to be specified).
Implemented in vpRobotViper850, vpRobotViper650, vpRobotFranka, vpRobotAfma6, vpSimulatorViper850, vpRobotAfma4, vpSimulatorAfma6, vpSimulatorPioneerPan, vpSimulatorPioneer, vpRobotCamera, vpRobotFlirPtu, vpSimulatorCamera, vpRobotKinova, vpRobotBiclops, vpRobotPtu46, and vpRobotTemplate.
Referenced by vpRobotPioneer::get_eJe(), vpRobotTemplate::get_eMc(), vpRobotFlirPtu::get_eMc(), vpRobotViper650::getControlMode(), vpRobotViper850::getControlMode(), vpRobotFranka::getHandler(), vpRobotKinova::getNumDevices(), and vpRobot::getPosition().
|
inherited |
Return the current robot position in the specified frame.
Definition at line 216 of file vpRobot.cpp.
References vpRobot::getPosition().
|
inlineprotectedinherited |
Definition at line 172 of file vpRobot.h.
Referenced by vpSimulatorAfma6::computeArticularVelocity(), and vpSimulatorViper850::computeArticularVelocity().
|
inlinevirtualinherited |
Definition at line 144 of file vpRobot.h.
Referenced by vpRobotBiclops::getPosition(), vpRobotBiclops::getVelocity(), vpRobotPtu46::setPosition(), vpRobotBiclops::setPosition(), vpSimulatorCamera::setPosition(), vpRobotCamera::setPosition(), vpSimulatorAfma6::setPosition(), vpRobotAfma4::setPosition(), vpSimulatorViper850::setPosition(), vpRobotAfma6::setPosition(), vpRobotFranka::setPosition(), vpRobotViper650::setPosition(), vpRobotViper850::setPosition(), vpRobotPtu46::setRobotState(), vpRobotBiclops::setRobotState(), vpRobotFlirPtu::setRobotState(), vpSimulatorAfma6::setRobotState(), vpSimulatorViper850::setRobotState(), vpRobotAfma4::setRobotState(), vpRobotAfma6::setRobotState(), vpRobotFranka::setRobotState(), vpRobotViper650::setRobotState(), vpRobotViper850::setRobotState(), vpRobotTemplate::setVelocity(), vpRobotBiclops::setVelocity(), vpRobotPtu46::setVelocity(), vpSimulatorCamera::setVelocity(), vpRobotCamera::setVelocity(), vpSimulatorPioneer::setVelocity(), vpSimulatorPioneerPan::setVelocity(), vpRobotKinova::setVelocity(), vpRobotFlirPtu::setVelocity(), vpSimulatorAfma6::setVelocity(), vpSimulatorViper850::setVelocity(), vpRobotAfma4::setVelocity(), vpRobotAfma6::setVelocity(), vpRobotFranka::setVelocity(), vpRobotViper650::setVelocity(), vpRobotViper850::setVelocity(), vpRobotFlirPtu::stopMotion(), vpSimulatorAfma6::stopMotion(), vpSimulatorViper850::stopMotion(), vpRobotFranka::stopMotion(), vpRobotViper650::stopMotion(), and vpRobotViper850::stopMotion().
|
inline |
Return the sampling time.
Definition at line 82 of file vpRobotSimulator.h.
Referenced by vpVirtualGrabber::acquire(), vpSimulatorAfma6::updateArticularPosition(), and vpSimulatorViper850::updateArticularPosition().
|
pure virtualinherited |
Implemented in vpRobotViper850, vpRobotViper650, vpRobotWireFrameSimulator, vpSimulatorViper850, vpRobotAfma6, vpSimulatorAfma6, vpRobotAfma4, vpRobotKinova, vpRobotFlirPtu, vpRobotPioneer, vpRobotPtu46, vpRobotBiclops, and vpRobotTemplate.
Referenced by vpRobotPioneer::get_eJe(), vpRobotViper650::getControlMode(), vpRobotViper850::getControlMode(), vpRobotTemplate::set_eMc(), vpRobotFlirPtu::set_eMc(), and vpRobotKinova::setVerbose().
|
staticinherited |
Saturate velocities.
| v_in | : Vector of input velocities to saturate. Translation velocities should be expressed in m/s while rotation velocities in rad/s. |
| v_max | : Vector of maximal allowed velocities. Maximal translation velocities should be expressed in m/s while maximal rotation velocities in rad/s. |
| verbose | : Print a message indicating which axis causes the saturation. |
| vpRobotException::dimensionError | : If the input vectors have different dimensions. |
The code below shows how to use this static method in order to saturate a velocity skew vector.
Definition at line 163 of file vpRobot.cpp.
References vpException::dimensionError, and vpArray2D< Type >::size().
Referenced by vpRobotTemplate::setVelocity(), vpSimulatorCamera::setVelocity(), vpRobotCamera::setVelocity(), vpSimulatorPioneer::setVelocity(), vpRobotPioneer::setVelocity(), vpSimulatorPioneerPan::setVelocity(), vpRobotKinova::setVelocity(), vpRobotFlirPtu::setVelocity(), vpRobotAfma4::setVelocity(), vpRobotAfma6::setVelocity(), vpRobotFranka::setVelocity(), vpRobotViper650::setVelocity(), and vpRobotViper850::setVelocity().
|
inherited |
Set the maximal rotation velocity that can be sent to the robot during a velocity control.
| w_max | : Maximum rotational velocity expressed in rad/s. |
Definition at line 260 of file vpRobot.cpp.
References vpRobot::maxRotationVelocity.
Referenced by vpRobotViper650::getControlMode(), vpRobotViper850::getControlMode(), vpRobotViper650::setMaxRotationVelocity(), vpRobotViper850::setMaxRotationVelocity(), vpSimulatorAfma6::setPosition(), vpRobotCamera::vpRobotCamera(), and vpSimulatorCamera::vpSimulatorCamera().
|
inherited |
Set the maximal translation velocity that can be sent to the robot during a velocity control.
| v_max | : Maximum translation velocity expressed in m/s. |
Definition at line 239 of file vpRobot.cpp.
References vpRobot::maxTranslationVelocity.
Referenced by vpSimulatorAfma6::setPosition(), vpRobotCamera::vpRobotCamera(), and vpSimulatorCamera::vpSimulatorCamera().
|
pure virtualinherited |
Set a displacement (frame has to be specified) in position control.
Implemented in vpRobotViper850, vpRobotViper650, vpRobotFranka, vpRobotAfma6, vpSimulatorViper850, vpRobotAfma4, vpSimulatorAfma6, vpRobotFlirPtu, vpRobotKinova, vpRobotBiclops, vpRobotPtu46, and vpRobotTemplate.
Referenced by vpRobotPioneer::get_eJe(), vpRobotViper650::getControlMode(), vpRobotViper850::getControlMode(), vpRobotFranka::getHandler(), vpSimulatorAfma6::getPositioningVelocity(), vpSimulatorViper850::getPositioningVelocity(), vpRobotTemplate::set_eMc(), vpRobotFlirPtu::set_eMc(), vpRobotKinova::setCommandLayer(), and vpSimulatorAfma6::setPositioningVelocity().
|
protectedinherited |
Definition at line 207 of file vpRobot.cpp.
Referenced by vpSimulatorAfma6::init(), vpSimulatorViper850::init(), vpSimulatorCamera::setVelocity(), vpSimulatorPioneer::setVelocity(), vpSimulatorPioneerPan::setVelocity(), vpSimulatorAfma6::setVelocity(), and vpSimulatorViper850::setVelocity().
|
virtualinherited |
Reimplemented in vpRobotViper850, vpRobotViper650, vpRobotFranka, vpRobotAfma6, vpRobotAfma4, vpSimulatorViper850, vpSimulatorAfma6, vpRobotFlirPtu, vpRobotBiclops, and vpRobotPtu46.
Definition at line 201 of file vpRobot.cpp.
Referenced by vpRobotViper650::getControlMode(), vpRobotViper850::getControlMode(), vpRobotFranka::getHandler(), vpRobotFlirPtu::set_eMc(), vpSimulatorCamera::setPosition(), vpRobotCamera::setPosition(), vpSimulatorAfma6::setPositioningVelocity(), vpSimulatorViper850::setPositioningVelocity(), vpRobotPtu46::setRobotState(), vpRobotBiclops::setRobotState(), vpRobotFlirPtu::setRobotState(), vpSimulatorAfma6::setRobotState(), vpSimulatorViper850::setRobotState(), vpRobotAfma4::setRobotState(), vpRobotAfma6::setRobotState(), vpRobotFranka::setRobotState(), vpRobotViper650::setRobotState(), vpRobotViper850::setRobotState(), vpSimulatorCamera::setVelocity(), vpRobotCamera::setVelocity(), vpSimulatorPioneer::setVelocity(), vpSimulatorPioneerPan::setVelocity(), vpSimulatorAfma6::stopMotion(), and vpSimulatorViper850::stopMotion().
|
inlinevirtual |
Set the sampling time.
| delta_t | : Sampling time in second used to compute the robot displacement from the velocity applied to the robot during this time. |
Reimplemented in vpRobotWireFrameSimulator.
Definition at line 91 of file vpRobotSimulator.h.
Referenced by vpVirtualGrabber::acquire().
|
pure virtualinherited |
Set the velocity (frame has to be specified) that will be applied to the velocity controller.
Implemented in vpRobotViper850, vpRobotViper650, vpRobotFranka, vpRobotAfma6, vpRobotAfma4, vpSimulatorViper850, vpSimulatorAfma6, vpRobotFlirPtu, vpRobotKinova, vpSimulatorPioneerPan, vpRobotPioneer, vpSimulatorPioneer, vpRobotCamera, vpSimulatorCamera, vpRobotBiclops, vpRobotPtu46, and vpRobotTemplate.
Referenced by vpRobotPioneer::get_eJe(), vpRobotViper650::getControlMode(), vpRobotViper850::getControlMode(), vpRobotFranka::getHandler(), vpRobotTemplate::set_eMc(), vpRobotFlirPtu::set_eMc(), vpRobotKinova::setPluginLocation(), vpSimulatorAfma6::setPositioningVelocity(), and vpSimulatorViper850::setPositioningVelocity().
|
inlineinherited |
Definition at line 159 of file vpRobot.h.
Referenced by vpRobotAfma4::vpRobotAfma4(), vpRobotAfma6::vpRobotAfma6(), vpRobotViper650::vpRobotViper650(), and vpRobotViper850::vpRobotViper850().
|
protectedinherited |
Definition at line 112 of file vpRobot.h.
Referenced by vpRobot::operator=(), vpRobotCamera::vpRobotCamera(), vpSimulatorCamera::vpSimulatorCamera(), vpSimulatorPioneer::vpSimulatorPioneer(), and vpSimulatorPioneerPan::vpSimulatorPioneerPan().
|
protected |
Definition at line 65 of file vpRobotSimulator.h.
Referenced by vpSimulatorCamera::setVelocity(), vpRobotCamera::setVelocity(), vpSimulatorPioneer::setVelocity(), and vpSimulatorPioneerPan::setVelocity().
|
protectedinherited |
robot Jacobian expressed in the end-effector frame
Definition at line 104 of file vpRobot.h.
Referenced by vpRobotFlirPtu::get_eJe(), vpSimulatorCamera::get_eJe(), vpRobotCamera::get_eJe(), vpRobot::operator=(), vpRobotAfma4::setVelocity(), vpRobotCamera::vpRobotCamera(), and vpSimulatorCamera::vpSimulatorCamera().
|
protectedinherited |
is the robot Jacobian expressed in the end-effector frame available
Definition at line 106 of file vpRobot.h.
Referenced by vpRobot::operator=(), vpRobotCamera::vpRobotCamera(), vpSimulatorCamera::vpSimulatorCamera(), vpSimulatorPioneer::vpSimulatorPioneer(), and vpSimulatorPioneerPan::vpSimulatorPioneerPan().
|
protectedinherited |
robot Jacobian expressed in the robot reference frame available
Definition at line 108 of file vpRobot.h.
Referenced by vpRobotFlirPtu::get_fJe(), and vpRobot::operator=().
|
protectedinherited |
is the robot Jacobian expressed in the robot reference frame available
Definition at line 110 of file vpRobot.h.
Referenced by vpRobot::operator=(), vpRobotCamera::vpRobotCamera(), vpSimulatorCamera::vpSimulatorCamera(), vpSimulatorPioneer::vpSimulatorPioneer(), and vpSimulatorPioneerPan::vpSimulatorPioneerPan().
|
protectedinherited |
Definition at line 98 of file vpRobot.h.
Referenced by vpRobot::getMaxRotationVelocity(), vpRobotTemplate::init(), vpRobotFlirPtu::init(), vpRobotKinova::init(), vpRobot::operator=(), vpRobot::setMaxRotationVelocity(), vpRobotPtu46::setVelocity(), vpRobotViper650::vpRobotViper650(), and vpRobotViper850::vpRobotViper850().
|
staticprotectedinherited |
Definition at line 99 of file vpRobot.h.
Referenced by vpRobotTemplate::init(), vpRobotFlirPtu::init(), and vpRobotKinova::init().
|
protectedinherited |
Definition at line 96 of file vpRobot.h.
Referenced by vpRobot::getMaxTranslationVelocity(), vpRobotTemplate::init(), vpRobotFlirPtu::init(), vpRobotKinova::init(), vpRobot::operator=(), and vpRobot::setMaxTranslationVelocity().
|
staticprotectedinherited |
Definition at line 97 of file vpRobot.h.
Referenced by vpRobotTemplate::init(), vpRobotFlirPtu::init(), and vpRobotKinova::init().
|
protectedinherited |
number of degrees of freedom
Definition at line 102 of file vpRobot.h.
Referenced by vpRobotKinova::getJointPosition(), vpRobotTemplate::init(), vpRobotFlirPtu::init(), vpRobotKinova::init(), vpRobot::operator=(), vpRobotKinova::setDoF(), vpRobotKinova::setJointVelocity(), vpRobotKinova::setPosition(), vpRobotTemplate::setVelocity(), vpRobotFlirPtu::setVelocity(), vpRobotKinova::setVelocity(), vpRobotCamera::vpRobotCamera(), vpRobotFranka::vpRobotFranka(), vpSimulatorCamera::vpSimulatorCamera(), vpSimulatorPioneer::vpSimulatorPioneer(), and vpSimulatorPioneerPan::vpSimulatorPioneerPan().
|
protectedinherited |
Definition at line 114 of file vpRobot.h.
Referenced by vpRobot::operator=(), vpRobotCamera::vpRobotCamera(), vpSimulatorCamera::vpSimulatorCamera(), vpSimulatorPioneer::vpSimulatorPioneer(), vpSimulatorPioneerPan::vpSimulatorPioneerPan(), and vpRobot::~vpRobot().
|
protectedinherited |
Definition at line 113 of file vpRobot.h.
Referenced by vpRobot::operator=(), vpRobotCamera::vpRobotCamera(), vpSimulatorCamera::vpSimulatorCamera(), vpSimulatorPioneer::vpSimulatorPioneer(), vpSimulatorPioneerPan::vpSimulatorPioneerPan(), and vpRobot::~vpRobot().
|
protectedinherited |
Definition at line 116 of file vpRobot.h.
Referenced by vpRobotAfma4::init(), vpRobotAfma6::init(), vpRobotViper650::init(), vpRobotViper850::init(), vpRobot::operator=(), vpRobotAfma4::vpRobotAfma4(), vpRobotAfma6::vpRobotAfma6(), vpRobotViper650::vpRobotViper650(), and vpRobotViper850::vpRobotViper850().
 1.8.13
1.8.13