Note that all the material (source code, input video, CAD model or XML settings files) described and used in this tutorial is part of ViSP source code and could be downloaded using the following command:
In ViSP and in the computer vision community, camera intrinsic parameters are the following:
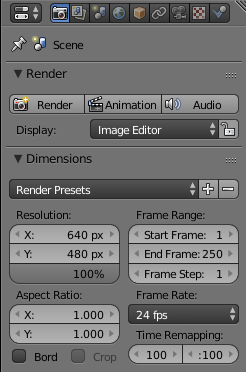
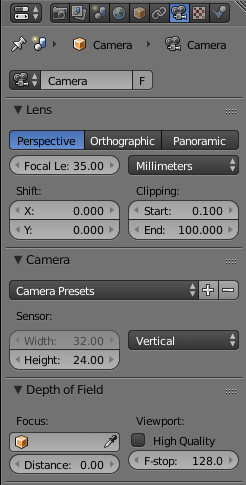
Focal length can be set with the camera panel by changing the focal length and/or the sensor size:
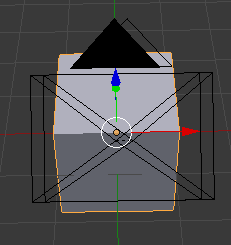
To generate the depth map, add a second camera and set the appropriate parameters to match the desired intrinsic parameters. Then select one camera (the child object) and the other one (the parent object) and hit Ctrl + P to parent them. This way, the two cameras will be linked when you will move the cameras.
Do not forget to add some lights to make the object visible.
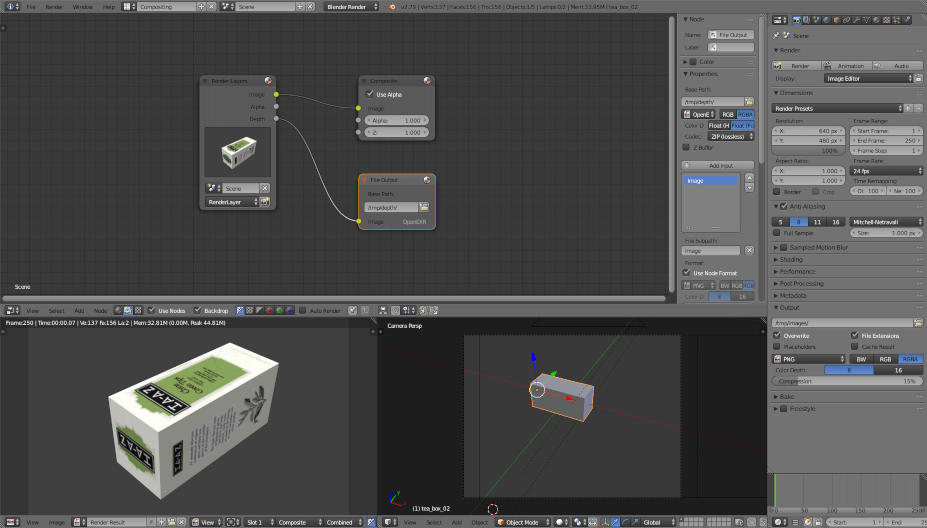
The easiest thing is to run the animation first with the camera used to generate color images and a second time with the one for the depth maps. To switch the main camera, go to the Scene panel and select the desired camera.
This script will also automatically generate and save the animation images and write the corresponding camera poses.
#include <iostream>
#include <visp3/core/vpDisplay.h>
#include <visp3/core/vpIoTools.h>
#include <visp3/io/vpImageIo.h>
#include <visp3/gui/vpDisplayX.h>
#include <visp3/gui/vpDisplayGDI.h>
#include <visp3/gui/vpDisplayOpenCV.h>
#include <visp3/mbt/vpMbGenericTracker.h>
#if (VISP_HAVE_OPENCV_VERSION >= 0x020403)
namespace {
vpImage<uint16_t> &I_depth_raw,
unsigned int &depth_width,
unsigned int &depth_height,
{
char buffer[FILENAME_MAX];
std::stringstream ss;
ss << input_directory << "/images/%04d.jpg";
sprintf(buffer, ss.str().c_str(), cpt);
std::string filename_img = buffer;
std::cerr << "Cannot read: " << filename_img << std::endl;
return false;
}
ss.str("");
ss << input_directory << "/depth/Image%04d.exr";
sprintf(buffer, ss.str().c_str(), cpt);
std::string filename_depth = buffer;
cv::Mat depth_raw = cv::imread(filename_depth, cv::IMREAD_ANYDEPTH | cv::IMREAD_ANYCOLOR);
if (depth_raw.empty()) {
std::cerr << "Cannot read: " << filename_depth << std::endl;
return false;
}
depth_width = static_cast<unsigned int>(depth_raw.cols);
depth_height = static_cast<unsigned int>(depth_raw.rows);
I_depth_raw.
resize(depth_height, depth_width);
pointcloud.resize(depth_width*depth_height);
for (int i = 0; i < depth_raw.rows; i++) {
for (int j = 0; j < depth_raw.cols; j++) {
I_depth_raw[i][j] = static_cast<uint16_t>(32767.5f * depth_raw.at<cv::Vec3f>(i, j)[0]);
double x = 0.0, y = 0.0;
double Z = depth_raw.at<cv::Vec3f>(i, j)[0] > 2.0f ? 0.0 : static_cast<double>(depth_raw.at<cv::Vec3f>(i, j)[0]);
size_t idx = static_cast<size_t>(i*depth_raw.cols + j);
pointcloud[idx].resize(3);
pointcloud[idx][0] = x*Z;
pointcloud[idx][1] = y*Z;
pointcloud[idx][2] = Z;
}
}
ss.str("");
ss << input_directory << "/camera_poses/Camera_%03d.txt";
sprintf(buffer, ss.str().c_str(), cpt);
std::string filename_pose = buffer;
std::ifstream f_pose;
f_pose.open(filename_pose.c_str());
if (!f_pose.is_open()) {
std::cerr << "Cannot read: " << filename_pose << std::endl;
return false;
}
cMo_ground_truth.
load(f_pose);
return true;
}
}
int main(int argc, char *argv[])
{
std::string input_directory = ".";
std::string config_color = "teabox.xml", config_depth = "teabox_depth.xml";
std::string model_color = "teabox.cao", model_depth = "teabox.cao";
std::string init_file = "teabox.init";
std::string extrinsic_file = "depth_M_color.txt";
unsigned int first_frame_index = 1;
bool disable_depth = false;
bool display_ground_truth = false;
bool click = false;
for (int i = 1; i < argc; i++) {
if (std::string(argv[i]) == "--input_directory" && i + 1 < argc) {
input_directory = std::string(argv[i + 1]);
} else if (std::string(argv[i]) == "--config_color" && i + 1 < argc) {
config_color = std::string(argv[i + 1]);
} else if (std::string(argv[i]) == "--config_depth" && i + 1 < argc) {
config_depth = std::string(argv[i + 1]);
} else if (std::string(argv[i]) == "--model_color" && i + 1 < argc) {
model_color = std::string(argv[i + 1]);
} else if (std::string(argv[i]) == "--model_depth" && i + 1 < argc) {
model_depth = std::string(argv[i + 1]);
} else if (std::string(argv[i]) == "--init_file" && i + 1 < argc) {
init_file = std::string(argv[i + 1]);
} else if (std::string(argv[i]) == "--extrinsics" && i + 1 < argc) {
extrinsic_file = std::string(argv[i + 1]);
} else if (std::string(argv[i]) == "--disable_depth") {
disable_depth = true;
} else if (std::string(argv[i]) == "--display_ground_truth") {
display_ground_truth = true;
} else if (std::string(argv[i]) == "--click") {
click = true;
} else if (std::string(argv[i]) == "--first_frame_index" && i+1 < argc) {
first_frame_index = static_cast<unsigned int>(atoi(argv[i+1]));
}
else if (std::string(argv[i]) == "--help" || std::string(argv[i]) == "-h") {
std::cout << "Usage: \n" << argv[0] << " [--input_directory <data directory> (default: .)]"
" [--config_color <object.xml> (default: teabox.xml)] [--config_depth <object.xml> (default: teabox_depth.xml)]"
" [--model_color <object.cao> (default: teabox.cao)] [--model_depth <object.cao> (default: teabox.cao)]"
" [--init_file <object.init> (default: teabox.init)]"
" [--extrinsics <depth to color transformation> (default: depth_M_color.txt)] [--disable_depth]"
" [--display_ground_truth] [--click] [--first_frame_index <index> (default: 1)]" << std::endl;
return EXIT_SUCCESS;
}
}
std::cout << "input_directory: " << input_directory << std::endl;
std::cout << "config_color: " << config_color << std::endl;
std::cout << "config_depth: " << config_depth << std::endl;
std::cout << "model_color: " << model_color << std::endl;
std::cout << "model_depth: " << model_depth << std::endl;
std::cout << "init_file: " << model_depth << std::endl;
std::cout << "extrinsic_file: " << extrinsic_file << std::endl;
std::cout << "first_frame_index: " << first_frame_index << std::endl;
std::cout << "disable_depth: " << disable_depth << std::endl;
std::cout << "display_ground_truth: " << display_ground_truth << std::endl;
std::cout << "click: " << click << std::endl;
std::vector<int> tracker_types;
if (!disable_depth)
if (!disable_depth)
else
if (!disable_depth)
else
std::cout << "cam_color:\n" << cam_color << std::endl;
std::cout << "cam_depth:\n" << cam_depth << std::endl;
unsigned int depth_width = 0, depth_height = 0;
std::vector<vpColVector> pointcloud;
unsigned int frame_cpt = first_frame_index;
read_data(frame_cpt, input_directory, I, I_depth_raw, depth_width, depth_height, pointcloud, cam_depth, cMo_ground_truth);
#if defined(VISP_HAVE_X11)
#elif defined(VISP_HAVE_GDI)
#else
#endif
d1.
init(I, 0, 0,
"Color image");
d2.
init(I_depth, static_cast<int>(I.
getWidth()), 0,
"Depth image");
if (!disable_depth) {
std::ifstream f_extrinsics;
f_extrinsics.open(extrinsic_file.c_str());
depthMcolor.
load(f_extrinsics);
tracker.setCameraTransformationMatrix("Camera2", depthMcolor);
std::cout << "depthMcolor:\n" << depthMcolor << std::endl;
}
if (display_ground_truth) {
} else
try {
bool quit = false;
while (!quit && read_data(frame_cpt, input_directory, I, I_depth_raw, depth_width, depth_height, pointcloud, cam_depth, cMo_ground_truth)) {
if (display_ground_truth) {
} else {
if (!disable_depth) {
std::map<std::string, const vpImage<unsigned char> *> mapOfImages;
std::map<std::string, const std::vector<vpColVector> *> mapOfPointClouds;
std::map<std::string, unsigned int> mapOfPointCloudWidths;
std::map<std::string, unsigned int> mapOfPointCloudHeights;
mapOfImages["Camera1"] = &I;
mapOfPointClouds["Camera2"] = &pointcloud;
mapOfPointCloudWidths["Camera2"] = depth_width;
mapOfPointCloudHeights["Camera2"] = depth_height;
tracker.
track(mapOfImages, mapOfPointClouds, mapOfPointCloudWidths, mapOfPointCloudHeights);
} else {
}
}
std::cout << "\nFrame: " << frame_cpt << std::endl;
if (!display_ground_truth)
std::cout << "cMo:\n" << cMo << std::endl;
std::cout << "cMo ground truth:\n" << cMo_ground_truth << std::endl;
if (!disable_depth) {
}
else {
}
std::ostringstream oss;
oss << "Frame: " << frame_cpt;
if (!display_ground_truth) {
{
std::stringstream ss;
}
{
std::stringstream ss;
ss << "Features: edges " << tracker.getNbFeaturesEdge()
<< ", klt " << tracker.getNbFeaturesKlt()
<< ", depth " << tracker.getNbFeaturesDepthDense();
}
}
switch (button) {
quit = !click;
break;
click = !click;
break;
default:
break;
}
}
frame_cpt++;
}
} catch (std::exception& e) {
std::cerr << "Catch exception: " << e.what() << std::endl;
}
return EXIT_SUCCESS;
}
#else
int main()
{
std::cout << "To run this tutorial, ViSP should be built with OpenCV and pugixml libraries." << std::endl;
return EXIT_SUCCESS;
}
#endif
Default parameters allow to run the binary with the data provided in ViSP. Just run:
![\[ \begin{bmatrix} p_x & 0 & u_0 \\ 0 & p_y & v_0 \\ 0 & 0 & 1 \end{bmatrix} \]](form_1408.png)


![\[ p_x = \frac{f_{x\text{ in mm}} \times \text{image width in px}}{\text{sensor width in mm}} \]](form_1411.png)




 1.8.11
1.8.11 
