|
Visual Servoing Platform
version 3.6.1 under development (2025-03-14)
|
|
Visual Servoing Platform
version 3.6.1 under development (2025-03-14)
|
This tutorial explains also how to implement a position-based visual-servoing with an UR robot equipped with an Intel Realsense camera. It follows Tutorial: IBVS with a robot from Universal Robots that explains also how to setup the robot.
An example of position-based visual servoing using a robot from Universal Robots equipped with a Realsense camera is available in servoUniversalRobotsPBVS.cpp.
 , the homogeneous transformation between robot end-effector and camera frame. We suppose here that the file is located in
, the homogeneous transformation between robot end-effector and camera frame. We suppose here that the file is located in apps/calibration/intrinsic/eMc.yaml.Now enter in example/servo-universal-robots folder and run servoUniversalRobotsPBVS binary using --eMc to locate the file containing the transformation. Other options are available. Using --help show them:
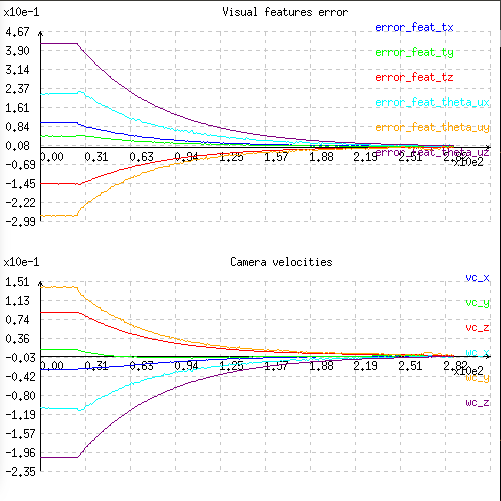
Run the binary activating the plot and using a constant gain:
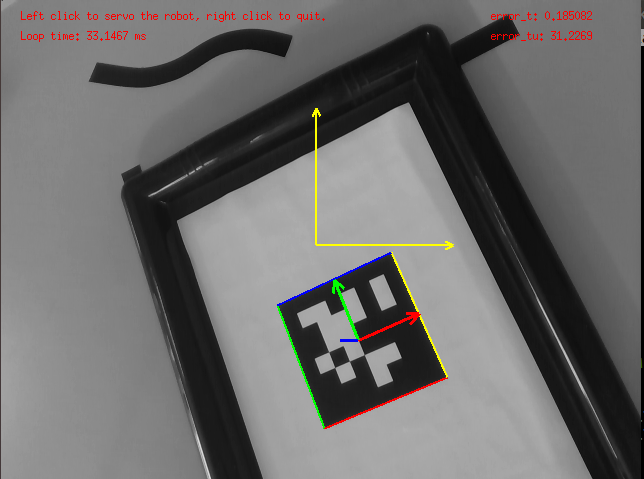
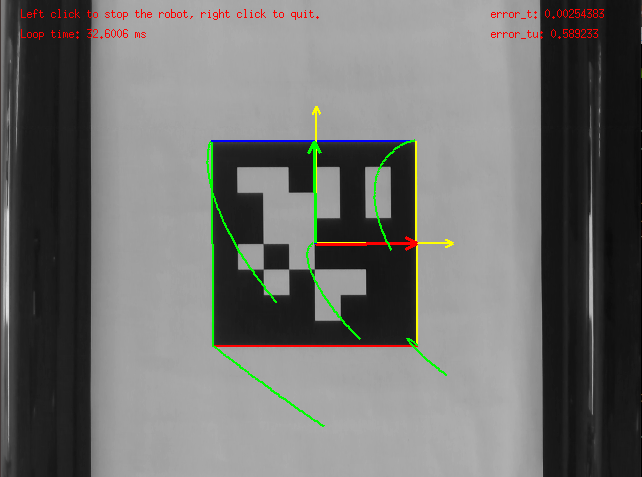
Use the left mouse click to enable the robot controller, and the right click to quit the binary.
At this point the behaviour that you should observe is the following:
You can also activate an adaptive gain that will make the convergence faster:
You can also start the robot with a zero velocity at the beginning introducing task sequencing option:
And finally you can activate the adaptive gain and task sequencing:
To learn more about adaptive gain and task sequencing see Tutorial: How to boost your visual servo control law.