|
Visual Servoing Platform
version 3.5.0 under development (2022-02-15)
|
|
Visual Servoing Platform
version 3.5.0 under development (2022-02-15)
|
This tutorial focuses on pinhole camera calibration. The goal of the calibration is here to estimate some camera parameters that allows to make the relation between camera's natural units (pixel positions in the image) and real world units (normalized position in meters in the image plane).
If we denote  the position of a pixel in the digitized image, this position is related to the corresponding coordinates
the position of a pixel in the digitized image, this position is related to the corresponding coordinates  in the normalized space.
in the normalized space.
In ViSP we consider two unit conversions:
![\[ \begin{array}{l} u = u_0 + x p_x (1+k_{ud} r^2) \\ v = v_0 + y p_y (1+k_{ud} r^2) \end{array} \]](form_1309.png)

![\[ \begin{array}{l} x = (u-u_0)*(1+k_{du} r^2)/p_x \\ y = (v-v_0)*(1+k_{du} r^2)/p_y \end{array} \]](form_1310.png)

In this model we consider the parameters  where:
where:
 are the coordinates of the principal point in pixel;
are the coordinates of the principal point in pixel; are the ratio between the focal length and the size of a pixel;
are the ratio between the focal length and the size of a pixel; are the parameters used to correct the distortion.
are the parameters used to correct the distortion.  is the distortion parameter used to transform the coordinates from undistorted to distorted images, while
is the distortion parameter used to transform the coordinates from undistorted to distorted images, while  is used to transform the coordinates from distorted to undistorted images.
is used to transform the coordinates from distorted to undistorted images.The calibration process allows to estimate the values of these parameters.
The following recommendation should be taken into account to obtain good results:
How to improve calibration accuracy:
1. Download and print, one of the following calibration grid
2. Stick the printed grid on a rigid support
3. Acquire images of the calibration grid
To calibrate your camera you need to take snapshots of one of these two patterns with your camera. At least 5 good snapshots of the input pattern acquired at different positions are requested for good results.
To this end see Tutorial: Image frame grabbing and use one of the binaries that could be found in tutorial/grabber folder to grab single shot images of the grid.
For example, with a webcam connected to a laptop running Linux (Ubuntu, Fedora...) use one of the following:
./tutorial-grabber-v4l2 --seqname chessboard-%02d.jpg --record 1 ./tutorial-grabber-opencv --seqname chessboard-%02d.jpg --record 1
If you have rather a PointGrey camera use one of the following:
./tutorial-grabber-1394 --seqname chessboard-%02d.jpg --record 1 ./tutorial-grabber-flycapture --seqname chessboard-%02d.jpg --record 1
If you have rather a firewire camera that doesn't come from PointGrey use one of the following:
./tutorial-grabber-1394 --seqname chessboard-%02d.jpg --record 1 ./tutorial-grabber-opencv --seqname chessboard-%02d.jpg --record 1
If you have a Basler camera use rather:
./tutorial-grabber-basler-pylon --seqname chessboard-%02d.jpg --record 1
If you have a Realsense camera use rather:
./tutorial-grabber-realsense --seqname chessboard-%02d.jpg --record 1
If you have an Occipital Structure Core camera use rather:
./tutorial-grabber-structure-core --seqname chessboard-%02d.jpg --record 1
If you have a Parrot Bebop 2 drone camera use rather:
./tutorial-grabber-bebop2 --seqname chessboard-%02d.jpg --record 1
or, if you want to calibrate the camera for HD 720p usage :
./tutorial-grabber-bebop2 --seqname chessboard-%02d.jpg --record 1 --hd_resolution
In all other cases, try with:
./tutorial-grabber-opencv --seqname chessboard-%02d.jpg --record 1
All the material (source code and images) described in this tutorial is part of ViSP source code and could be downloaded using the following command:
$ svn export https://github.com/lagadic/visp.git/trunk/example/calibration
The calibration tool is available in calibrate_camera.cpp located in example/calibration folder.
We will not describe in detail the source, but just mention that:
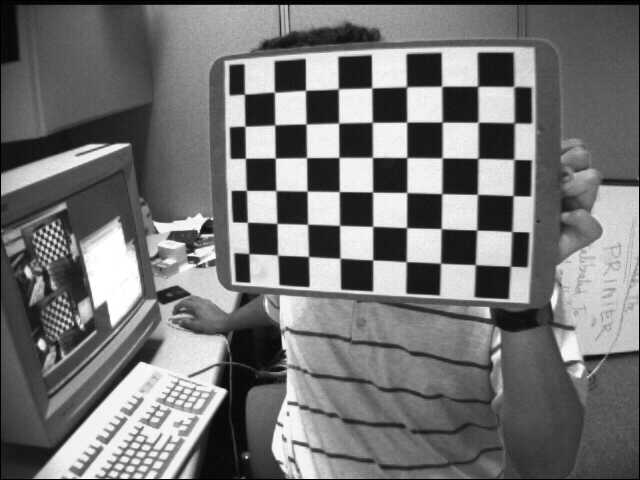
libjpeg and libpng 3rd party libraries are installed and detected during ViSP configuration, you may consider .pgm, .ppm, .jpg, .png images. Default configuration files are provided in example/calibration folder;camera.xml file.In this section we consider the OpenCV chessboard pattern that has a size of 9 by 6. Each square of the chessboard is 0.025 meters large. A set of 13 images extracted from OpenCV dataset are provided chessboard-01.jpg, chessboard-02.jpg, ..., chessboard-13.jpg. Hereafter we give an example of one of these images.
Before starting the calibration we need to create a configuration file. We create default-chessboard.cfg with the following content:
# Number of inner corners per a item row and column. (square, circle) BoardSize_Width: 9 BoardSize_Height: 6 # The size of a square in meters Square_Size: 0.025 # The type of pattern used for camera calibration. # One of: CHESSBOARD or CIRCLES_GRID Calibrate_Pattern: CHESSBOARD # The input image sequence to use for calibration Input: chessboard-%02d.jpg # Tempo in seconds between two images. If > 10 wait a click to continue Tempo: 1
calibrate_camera binary.To estimate the camera parameters, just enter in ViSP \<binary_dir\>/examples/calibration and run:
./calibrate-camera default-chessboard.cfg
This command will produce the following output:
$ ./calibrate-camera default-chessboard.cfg Settings from config file: default-chessboard.cfg grid width : 9 grid height: 6 square size: 0.025 pattern : CHESSBOARD input seq : chessboard-%02d.jpg tempo : 1 Settings from command line options: Ouput xml file : camera.xml Camera name : Camera Initialize camera parameters with default values Camera parameters used for initialization: Camera parameters for perspective projection without distortion: px = 600 py = 600 u0 = 320 v0 = 240 Process frame: chessboard-01.jpg, grid detection status: 1, image used as input data Process frame: chessboard-02.jpg, grid detection status: 1, image used as input data Process frame: chessboard-03.jpg, grid detection status: 1, image used as input data Process frame: chessboard-04.jpg, grid detection status: 1, image used as input data Process frame: chessboard-05.jpg, grid detection status: 1, image used as input data Process frame: chessboard-06.jpg, grid detection status: 1, image used as input data Process frame: chessboard-07.jpg, grid detection status: 1, image used as input data Process frame: chessboard-08.jpg, grid detection status: 1, image used as input data Process frame: chessboard-09.jpg, grid detection status: 1, image used as input data Process frame: chessboard-10.jpg, grid detection status: 1, image used as input data Process frame: chessboard-11.jpg, grid detection status: 1, image used as input data Process frame: chessboard-12.jpg, grid detection status: 1, image used as input data Process frame: chessboard-13.jpg, grid detection status: 1, image used as input data Calibration without distortion in progress on 13 images... Camera parameters for perspective projection without distortion: px = 557.2519329 py = 561.1776205 u0 = 360.0754485 v0 = 235.5240362 Image chessboard-01.jpg reprojection error: 1.230158891 Image chessboard-02.jpg reprojection error: 1.447042293 Image chessboard-03.jpg reprojection error: 2.078525011 Image chessboard-04.jpg reprojection error: 1.553888654 Image chessboard-05.jpg reprojection error: 1.697849369 Image chessboard-06.jpg reprojection error: 2.284910081 Image chessboard-07.jpg reprojection error: 1.387893707 Image chessboard-08.jpg reprojection error: 1.664988951 Image chessboard-09.jpg reprojection error: 0.9447032921 Image chessboard-10.jpg reprojection error: 1.258540894 Image chessboard-11.jpg reprojection error: 1.845113925 Image chessboard-12.jpg reprojection error: 0.8621449347 Image chessboard-13.jpg reprojection error: 1.254269691 Global reprojection error: 1.552697985 Camera parameters without distortion successfully saved in "camera.xml" Calibration with distortion in progress on 13 images... Camera parameters for perspective projection with distortion: px = 536.982404 py = 537.4196388 u0 = 344.0958214 v0 = 235.1792108 kud = -0.2672672093 kdu = 0.3081092949 Image chessboard-01.jpg reprojection error: 0.2395321578 Image chessboard-02.jpg reprojection error: 1.238545486 Image chessboard-03.jpg reprojection error: 0.3207755448 Image chessboard-04.jpg reprojection error: 0.2601958886 Image chessboard-05.jpg reprojection error: 0.2338664574 Image chessboard-06.jpg reprojection error: 0.3297641256 Image chessboard-07.jpg reprojection error: 0.2475833215 Image chessboard-08.jpg reprojection error: 0.2602460339 Image chessboard-09.jpg reprojection error: 0.3159699755 Image chessboard-10.jpg reprojection error: 0.198531964 Image chessboard-11.jpg reprojection error: 0.2287278629 Image chessboard-12.jpg reprojection error: 0.406199404 Image chessboard-13.jpg reprojection error: 0.1950310138 Global reprojection error: 0.4338765096 ... Found camera with name: "Camera" Camera parameters without distortion successfully saved in "camera.xml" Estimated pose using vpPoseVector format: [tx ty tz tux tuy tuz] with translation in meter and rotation in rad Estimated pose on input data extracted from chessboard-01.jpg: -0.07660266271 -0.1085728703 0.4003484889 0.1682345774 0.2703219136 0.01344238413 Estimated pose on input data extracted from chessboard-02.jpg: -0.0597725773 0.08323149726 0.3540361653 0.4146214603 0.6466739629 -1.33632262 Estimated pose on input data extracted from chessboard-03.jpg: -0.0409369733 -0.1000680319 0.3187341271 -0.2814821404 0.181607087 0.354472929 Estimated pose on input data extracted from chessboard-04.jpg: -0.09952644787 -0.06700101163 0.3311921983 -0.1147265218 0.2351468125 -0.002270637719 Estimated pose on input data extracted from chessboard-05.jpg: 0.05741410545 -0.1148693995 0.3181348172 -0.2976648906 0.4269115417 1.311802711 Estimated pose on input data extracted from chessboard-06.jpg: 0.1661888244 -0.06524589624 0.338088106 0.4034420756 0.3039782719 1.64940724 Estimated pose on input data extracted from chessboard-07.jpg: 0.01821370536 -0.07151589851 0.3905543438 0.172544729 0.3466769676 1.86809415 Estimated pose on input data extracted from chessboard-08.jpg: 0.07798259969 -0.08758717052 0.3176589755 -0.09716654268 0.4802856194 1.752367718 Estimated pose on input data extracted from chessboard-09.jpg: -0.06737515848 -0.08078390458 0.2789852517 0.2019376892 -0.4259504159 0.1328986678 Estimated pose on input data extracted from chessboard-10.jpg: 0.04573124363 -0.1106681366 0.3391361625 -0.422722622 -0.5001185984 1.335604951 Estimated pose on input data extracted from chessboard-11.jpg: 0.04966729888 -0.1021952921 0.3230817897 -0.244202703 0.3486826514 1.529624327 Estimated pose on input data extracted from chessboard-12.jpg: 0.0326829825 -0.09134603223 0.2922525995 0.4616839947 -0.2854700243 1.239441135 Estimated pose on input data extracted from chessboard-13.jpg: 0.04392199094 -0.1078950481 0.3135404232 -0.1733990329 -0.4713258735 1.346433873
The resulting parameters are also saved in ./camera.xml file.
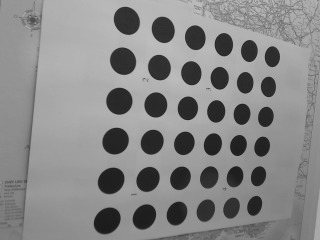
In this section we consider the ViSP symmetric circles grid pattern that has a size of 6 by 6. Each circle center of gravity is 0.034 meters distant from it's horizontal or vertical neighbor. We took 5 images called circles-01.jpg, circles-02.jpg, ..., circles-05.jpg. Hereafter we give an example of such an image.
Before starting the calibration we need to create a configuration file. We create circles-grid.cfg with the following content:
# Number of inner corners per a item row and column. (square, circle) BoardSize_Width: 6 BoardSize_Height: 6 # The size of a square in meters Square_Size: 0.034 # The type of pattern used for camera calibration. # One of: CHESSBOARD or CIRCLES_GRID Calibrate_Pattern: CIRCLES_GRID # The input image sequence to use for calibration Input: circles-%02d.jpg # Tempo in seconds between two images. If > 10 wait a click to continue Tempo: 1
calibrate_camera binary.To estimate the camera parameters, just enter in ViSP <binary_dir>/examples/calibration and run:
./calibrate-camera circles-grid.cfg
This command will produce the following output:
Settings from config file: default-circles.cfg grid width : 6 grid height: 6 square size: 0.034 pattern : CIRCLES_GRID input seq : circles-%02d.jpg tempo : 1 Settings from command line options: Ouput xml file : camera.xml Camera name : Camera Initialize camera parameters with default values Camera parameters used for initialization: Camera parameters for perspective projection without distortion: px = 600 py = 600 u0 = 160 v0 = 120 Process frame: circles-01.jpg, grid detection status: 1, image used as input data Process frame: circles-02.jpg, grid detection status: 1, image used as input data Process frame: circles-03.jpg, grid detection status: 1, image used as input data Process frame: circles-04.jpg, grid detection status: 1, image used as input data Process frame: circles-05.jpg, grid detection status: 1, image used as input data Calibration without distortion in progress on 5 images... Camera parameters for perspective projection without distortion: px = 276.509794 py = 272.9594743 u0 = 163.8652259 v0 = 113.304585 Image circles-01.jpg reprojection error: 0.3209792813 Image circles-02.jpg reprojection error: 0.3419007802 Image circles-03.jpg reprojection error: 0.2587615953 Image circles-04.jpg reprojection error: 0.3582072187 Image circles-05.jpg reprojection error: 0.3439095173 Global reprojection error: 0.3266397322 Camera parameters without distortion successfully saved in "camera.xml" Calibration with distortion in progress on 5 images... Camera parameters for perspective projection with distortion: px = 272.3968612 py = 268.6672142 u0 = 163.1810262 v0 = 112.9659689 kud = 0.03120756464 kdu = -0.03087352596 Image circles-01.jpg reprojection error: 0.2719452401 Image circles-02.jpg reprojection error: 0.3083295554 Image circles-03.jpg reprojection error: 0.2845516993 Image circles-04.jpg reprojection error: 0.3456180431 Image circles-05.jpg reprojection error: 0.2883152857 Global reprojection error: 0.3008977558 ... Found camera with name: "Camera" Camera parameters without distortion successfully saved in "camera.xml" Estimated pose using vpPoseVector format: [tx ty tz tux tuy tuz] with translation in meter and rotation in rad Estimated pose on input data extracted from circles-01.jpg: -0.08869815386 -0.07574169202 0.2543876665 0.00932552619 -0.1161670753 -0.06219301328 Estimated pose on input data extracted from circles-02.jpg: -0.03019947783 -0.07794008289 0.2265663076 0.04377113126 -0.474098285 0.09585559142 Estimated pose on input data extracted from circles-03.jpg: 0.02769610929 -0.08077604598 0.2414334564 0.2539091133 -0.4686503508 0.5745637311 Estimated pose on input data extracted from circles-04.jpg: -0.08516211221 -0.05523338957 0.2161552622 0.4338264761 -0.01669390893 -0.01146784849 Estimated pose on input data extracted from circles-05.jpg: -0.1103329039 -0.08543524482 0.268237962 0.4130501665 0.1926353241 0.2736078902
The resulting parameters are also saved in ./camera.xml file.
Since ViSP 3.3.1 we provide a set of tools to analyse calibration results.
Running calibrate-camera binary allows to visualize the locations of the calibration patterns in the image:
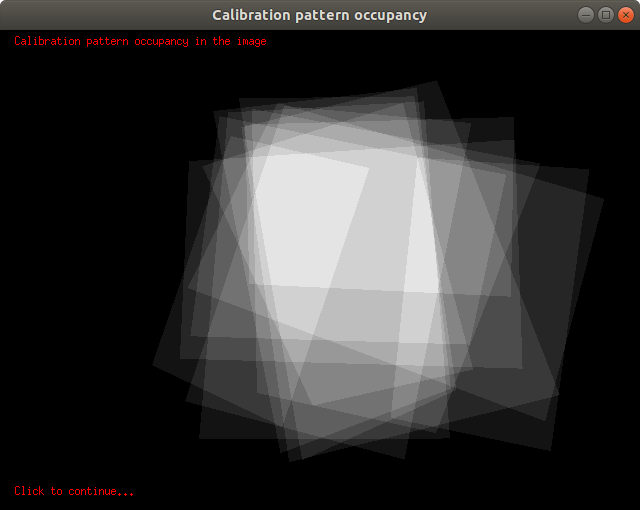
A good calibration is obtained when the patterns cover most part of the image.
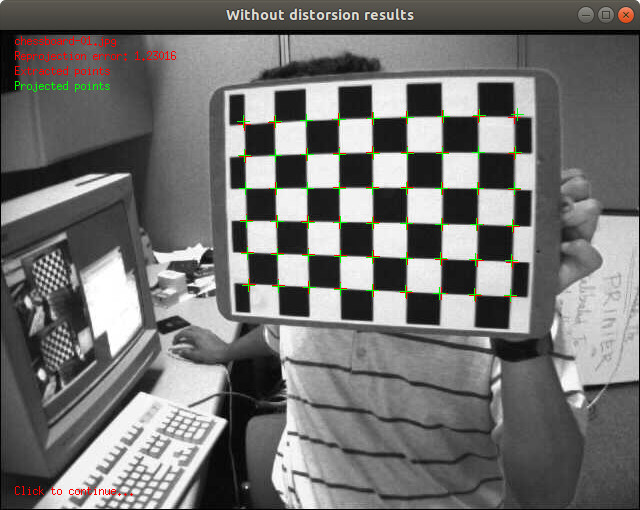
Reprojection error could be seen in the next image. It shows the current reprojection error, the extracted points and the projected points using the estimated cMo camera pose and camera parameters:
On the console, the global reprojection error is also given for the model without distorsion parameters:
Calibration without distortion in progress on 13 images... Camera parameters for perspective projection without distortion: px = 557.2519329 py = 561.1776205 u0 = 360.0754485 v0 = 235.5240362 Image chessboard-01.jpg reprojection error: 1.230158891 Image chessboard-02.jpg reprojection error: 1.447042293 Image chessboard-03.jpg reprojection error: 2.078525011 Image chessboard-04.jpg reprojection error: 1.553888654 Image chessboard-05.jpg reprojection error: 1.697849369 Image chessboard-06.jpg reprojection error: 2.284910081 Image chessboard-07.jpg reprojection error: 1.387893707 Image chessboard-08.jpg reprojection error: 1.664988951 Image chessboard-09.jpg reprojection error: 0.9447032921 Image chessboard-10.jpg reprojection error: 1.258540894 Image chessboard-11.jpg reprojection error: 1.845113925 Image chessboard-12.jpg reprojection error: 0.8621449347 Image chessboard-13.jpg reprojection error: 1.254269691 Global reprojection error: 1.552697985
and for the model with both distorsion parameters:
Calibration with distortion in progress on 13 images... Camera parameters for perspective projection with distortion: px = 536.982404 py = 537.4196388 u0 = 344.0958214 v0 = 235.1792108 kud = -0.2672672093 kdu = 0.3081092949 Image chessboard-01.jpg reprojection error: 0.2395321578 Image chessboard-02.jpg reprojection error: 1.238545486 Image chessboard-03.jpg reprojection error: 0.3207755448 Image chessboard-04.jpg reprojection error: 0.2601958886 Image chessboard-05.jpg reprojection error: 0.2338664574 Image chessboard-06.jpg reprojection error: 0.3297641256 Image chessboard-07.jpg reprojection error: 0.2475833215 Image chessboard-08.jpg reprojection error: 0.2602460339 Image chessboard-09.jpg reprojection error: 0.3159699755 Image chessboard-10.jpg reprojection error: 0.198531964 Image chessboard-11.jpg reprojection error: 0.2287278629 Image chessboard-12.jpg reprojection error: 0.406199404 Image chessboard-13.jpg reprojection error: 0.1950310138 Global reprojection error: 0.4338765096
A good calibration is obtained when extracted and reprojected points are very close each other and when global reprojection error is less than 1.0. Smaller is the reprojection error, better is the calibration.
To get an idea on how much there is distortion, calibrate-camera binary generates also the following images:
findChessboardCorners() function from OpenCV. This should allow seeing how distorted is the image.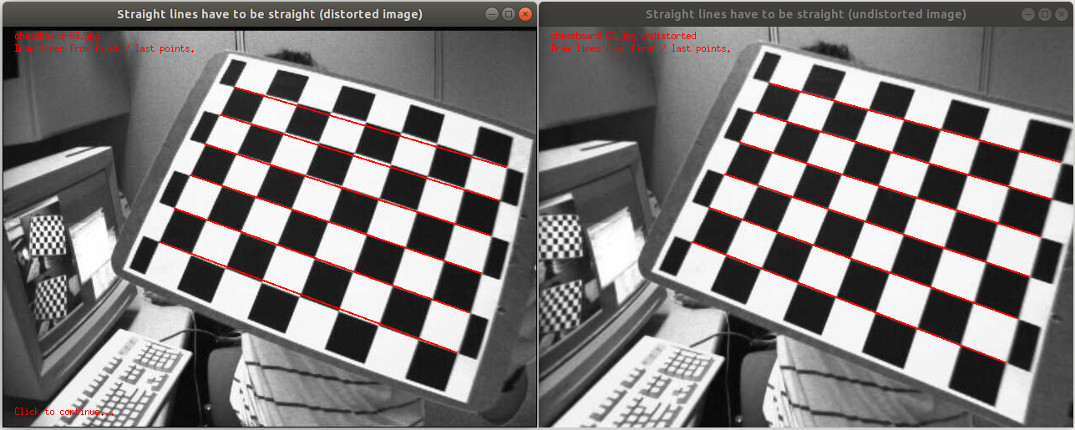
On the console, mean distance errors for line fitting for points extracted from distorted image and after using vpPixelMeterConversion::convertPoint() is given:
This tool computes the line fitting error (mean distance error) on image points extracted from the raw distorted image. chessboard-03.jpg line 1 fitting error on distorted points: 1.524931112 ; on undistorted points: 0.2997221937 chessboard-03.jpg line 2 fitting error on distorted points: 1.161437677 ; on undistorted points: 0.1608990656 chessboard-03.jpg line 3 fitting error on distorted points: 0.7274089743 ; on undistorted points: 0.1089682074 chessboard-03.jpg line 4 fitting error on distorted points: 0.2495991137 ; on undistorted points: 0.0648610129 chessboard-03.jpg line 5 fitting error on distorted points: 0.2932864898 ; on undistorted points: 0.07897041729 chessboard-03.jpg line 6 fitting error on distorted points: 0.9474403828 ; on undistorted points: 0.03407551552
Mean distance errors for line fitting for points extracted from undistorted image is also printed on the console:
This tool computes the line fitting error (mean distance error) on image points extracted from the undistorted image (vpImageTools::undistort()). chessboard-03.jpg undistorted image, line 1 fitting error: 0.0840157388 chessboard-03.jpg undistorted image, line 2 fitting error: 0.09982399891 chessboard-03.jpg undistorted image, line 3 fitting error: 0.07813388194 chessboard-03.jpg undistorted image, line 4 fitting error: 0.08870325502 chessboard-03.jpg undistorted image, line 5 fitting error: 0.08680507551 chessboard-03.jpg undistorted image, line 6 fitting error: 0.06309999164
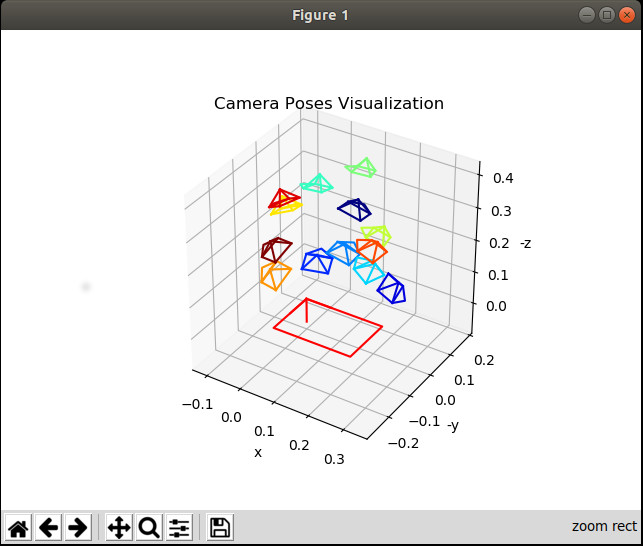
There is camera_calibration_show_extrinsics.py script that allows to display camera poses. Prior to use that script, you need to install scipy:
$ sudo apt install python-pip $ pip install scipy
To visualize camera poses used for calibration, run:
$ python camera_calibration_show_extrinsics.py --calibration camera.xml --scale_focal 20
It reads the camera poses saved in camera.xml file and display them with respect to the calibration grid considered as static.
The non linear algorithm used for calibration needs an initialization. By default the parameters used as initial guess are the one set in vpCameraParameters default constructor for px and py, while u0 and v0 are set to the image center coordinates. When images are near HD resolution or larger, or when the focal lens is large, this initial guess may be too far from the solution to make the algorithm converging. This behavior is illustrated below:
$ ./calibrate-camera chessboard.cfg Settings from config file: chessboard.cfg grid width : 9 grid height: 8 square size: 0.002 pattern : CHESSBOARD input seq : image%01d.png tempo : 1 Settings from command line options: Ouput xml file : camera.xml Camera name : Camera Initialize camera parameters with default values Camera parameters used for initialization: Camera parameters for perspective projection without distortion: px = 600 py = 600 u0 = 640 v0 = 512 Process frame: image1.png, grid detection status: 1, image used as input data frame: image1.png, unable to calibrate from single image, image rejected Process frame: image2.png, grid detection status: 1, image used as input data frame: image2.png, unable to calibrate from single image, image rejected Unable to calibrate. Image processing failed !
The work around is here to give an initial guess not so far from the solution so that it allows the algorithm to converge.
This initial guess is to set in an xml file, like here in camera-init.xml file:
$ more camera-init.xml
<?xml version="1.0"?>
<root>
<camera>
<name>Camera</name>
<image_width>1080</image_width>
<image_height>1440</image_height>
<model>
<type>perspectiveProjWithoutDistortion</type>
<!--Pixel ratio-->
<px>9700</px>
<py>9700</py>
<!--Principal point-->
<u0>540</u0>
<v0>720</v0>
</model>
</camera>
</root>
We set the image size, u0 and v0 to the image center coordinates, and px = py = 9700.
Now to use this file as initial guess, run:
$ calibrate-camera chessboard.cfg --init-from-xml camera-init.xml --camera-name Camera
It shows that the algorithm is now able to estimate the parameters:
Settings from config file: chessboard.cfg grid width : 9 grid height: 8 square size: 0.002 pattern : CHESSBOARD input seq : image%01d.png tempo : 1 Settings from command line options: Init parameters: camera-init.xml Ouput xml file : camera.xml Camera name : Camera Initialize camera parameters from xml file: camera-init.xml Found camera with name: "Camera" Camera parameters used for initialization: Camera parameters for perspective projection without distortion: px = 9700 py = 9700 u0 = 540 v0 = 720 Process frame: image1.png, grid detection status: 1, image used as input data Process frame: image2.png, grid detection status: 1, image used as input data Calibration without distortion in progress on 2 images... Camera parameters for perspective projection without distortion: px = 9654.217159 py = 9667.966935 u0 = 650.2304211 v0 = 519.018459 Image image1.png reprojection error: 0.8274370565 Image image2.png reprojection error: 0.6922641507 Global reprojection error: 0.7628504889 Camera parameters without distortion successfully saved in "camera.xml"
Once the camera is calibrated, you can remove distortion in an image to generate an undistorted image.
The following example available in tutorial-undistort.cpp shows how to do it.
In this example we first load the image chessboard.jpg
Then we read the camera parameters with distortion of a camera named "Camera" from ./camera.xml file.
If vpXmlParserCamera is not available, we initialize the camera parameters "by hand" using the following code:
Finally, we create a new image Iud where distortion is removed. This image is saved in chessboard-undistort.jpg.
Results are shown in the next images:
chessboard.jpgchessboard-undistort.jpg image where distorsion is removed thanks to the camera intrinsic parameters. Here you can see that chessboard lines are straight.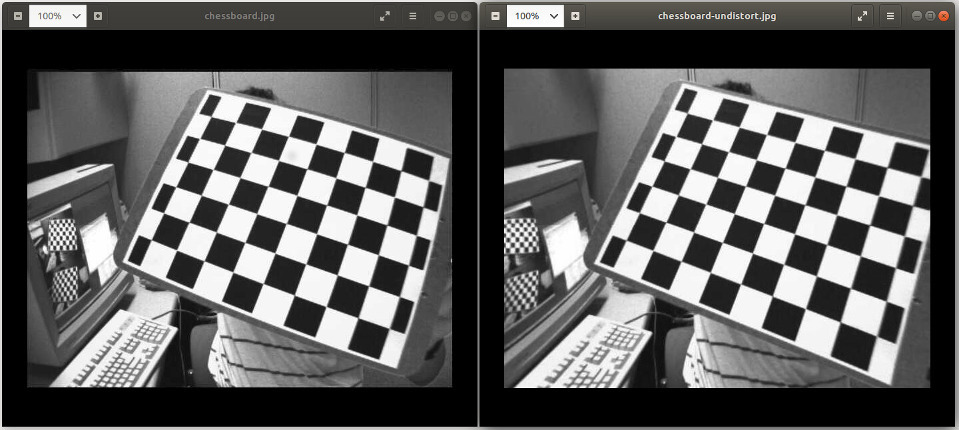
Instead of using vpImageTools::undistort() like in tutorial-undistort.cpp, we recommend to use vpImageTools::initUndistortMap() once over the first image, and then call vpImageTools::remap() for each image.
The pseudo code is the following:
You are now ready to see the Tutorial: Camera extrinsic calibration that will explain how to estimate the eye-in-hand transformation when the camera is mounted on a robot end-effector.
 1.8.13
1.8.13