|
ViSP
2.10.0
|
|
ViSP
2.10.0
|
#include <vpPioneerPan.h>
 Inheritance diagram for vpPioneerPan:
Inheritance diagram for vpPioneerPan:Public Member Functions | |
| vpPioneerPan () | |
| virtual | ~vpPioneerPan () |
| void | set_eJe (double q_pan) |
| vpHomogeneousMatrix | get_cMe () const |
| vpVelocityTwistMatrix | get_cVe () const |
| void | get_cVe (vpVelocityTwistMatrix &cVe) const |
| vpMatrix | get_eJe () const |
| void | set_cMe (const vpHomogeneousMatrix &cMe) |
| void | set_eJe (const vpMatrix &eJe) |
Protected Member Functions | |
| void | set_cMe () |
| void | set_mMp () |
| void | set_pMe (const double q) |
Protected Attributes | |
| vpHomogeneousMatrix | mMp_ |
| vpHomogeneousMatrix | pMe_ |
| vpHomogeneousMatrix | cMe_ |
| vpMatrix | eJe_ |
Generic functions for Pioneer mobile robots equiped with a pan head.
This class provides common features for Pioneer mobile robots equiped with a pan head.
This robot has three control velocities  , the translational and rotational velocities of the mobile platform, the pan head velocity respectively.
, the translational and rotational velocities of the mobile platform, the pan head velocity respectively.
The figure below shows the position of the frames that are used to model the robot. The end effector frame is here located at the pan axis.
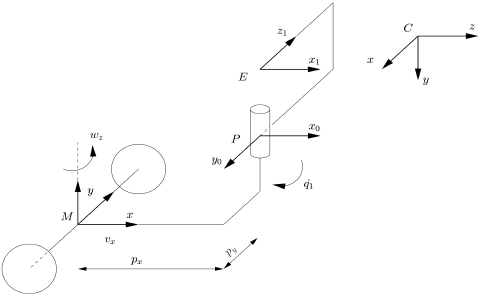
Considering
![\[{\bf v} = {^e}{\bf J}_e \; \left(\begin{array}{c} v_x \\ w_z \\ \dot{q_1} \\ \end{array} \right) \]](form_481.png)
with  respectively the translational and rotational control velocities of the mobile platform,
respectively the translational and rotational control velocities of the mobile platform,  the joint velocity of the pan head and
the joint velocity of the pan head and  the six dimention velocity skew expressed at point E in frame E, the robot jacobian is given by:
the six dimention velocity skew expressed at point E in frame E, the robot jacobian is given by:
![\[ {^e}{\bf J}_e = \left(\begin{array}{ccc} c_1 & -c_1*p_y - s_1*p_x & 0 \\ 0 & 0 & 0 \\ s_1 & -s_1*p_y + c_1*p_x & 0 \\ 0 & 0 & 0 \\ 0 & -1 & 1 \\ 0 & 0 & 0 \\ \end{array} \right) \]](form_483.png)
with  the position of the head base frame in the mobile platform frame located at the middle point between the two weels.
the position of the head base frame in the mobile platform frame located at the middle point between the two weels.
Definition at line 99 of file vpPioneerPan.h.
|
inline |
Create a pioneer mobile robot equiped with a pan head.
Definition at line 105 of file vpPioneerPan.h.
References vpUnicycle::set_cMe(), and vpUnicycle::set_eJe().
|
inlinevirtual |
Destructor that does nothing.
Definition at line 117 of file vpPioneerPan.h.
|
inlineinherited |
Return the tranformation  between the camera frame and the mobile robot end effector frame.
between the camera frame and the mobile robot end effector frame.
Definition at line 78 of file vpUnicycle.h.
|
inlineinherited |
Return the twist transformation from camera frame to the mobile robot end effector frame. This transformation allows to compute a velocity expressed in the end effector frame into the camera frame.
Definition at line 89 of file vpUnicycle.h.
References vpVelocityTwistMatrix::buildFrom().
Referenced by vpUnicycle::get_cVe().
|
inlineinherited |
Return the twist transformation from camera frame to the mobile robot end effector frame. This transformation allows to compute a velocity expressed in the end effector frame into the camera frame.
Definition at line 104 of file vpUnicycle.h.
References vpUnicycle::get_cVe().
|
inlineinherited |
Return the robot jacobian  expressed in the end effector frame.
expressed in the end effector frame.
 with
with  the robot control velocities and the six dimention velocity skew.
the robot control velocities and the six dimention velocity skew. Definition at line 115 of file vpUnicycle.h.
Referenced by vpRobotPioneer::get_eJe(), vpSimulatorPioneer::get_eJe(), and vpSimulatorPioneerPan::get_eJe().
|
inlineinherited |
Set the transformation between the camera frame and the end effector frame.
Definition at line 123 of file vpUnicycle.h.
Referenced by vpPioneer::vpPioneer(), and vpPioneerPan().
|
inlineprotected |
Set the transformation between the camera frame and the pan head end effector frame.
Definition at line 168 of file vpPioneerPan.h.
References vpHomogeneousMatrix::buildFrom(), and vpHomogeneousMatrix::inverse().
|
inlineinherited |
Set the robot jacobian expressed in the end effector frame.
| eJe | : The robot jacobian to set such as with the robot control velocities and the six dimention velocity skew. |
Definition at line 134 of file vpUnicycle.h.
Referenced by vpPioneer::vpPioneer(), and vpPioneerPan().
|
inline |
Set the robot jacobian expressed at point E the end effector frame located on the pan head.
Considering ![${\bf v} = {^e}{\bf J}_e \; [v_x, w_z, \dot{q_1}]$](form_485.png) with respectively the translational and rotational control velocities of the mobile platform, the joint velocity of the pan head and the six dimention velocity skew expressed at point E in frame E, the robot jacobian is given by:
with respectively the translational and rotational control velocities of the mobile platform, the joint velocity of the pan head and the six dimention velocity skew expressed at point E in frame E, the robot jacobian is given by:
with the position of the head base frame in the mobile platform frame located at the middle point between the two weels.
Definition at line 144 of file vpPioneerPan.h.
Referenced by vpSimulatorPioneerPan::setVelocity().
|
inlineprotected |
Set the transformation between the mobile platform frame located at the middle point between the two weels and the base frame of the pan head.
Definition at line 191 of file vpPioneerPan.h.
References vpMatrix::insert(), and vpTranslationVector::set().
|
inlineprotected |
Set the transformation between the pan head reference frame and the end-effector frame.
| q | : Position in rad of the pan axis. |
Definition at line 214 of file vpPioneerPan.h.
References vpMatrix::insert().
Referenced by vpSimulatorPioneerPan::setVelocity().
|
protectedinherited |
Definition at line 140 of file vpUnicycle.h.
Referenced by vpSimulatorPioneer::setVelocity(), and vpSimulatorPioneerPan::setVelocity().
|
protectedinherited |
Definition at line 141 of file vpUnicycle.h.
|
protected |
Definition at line 227 of file vpPioneerPan.h.
Referenced by vpSimulatorPioneerPan::setVelocity().
|
protected |
Definition at line 228 of file vpPioneerPan.h.
Referenced by vpSimulatorPioneerPan::setVelocity().
 1.8.9.1
1.8.9.1