|
ViSP
2.9.0
|
|
ViSP
2.9.0
|
This tutorial supposes that you have followed the Tutorial: Getting started.
In this tutorial you will learn how to use ViSP filtering functions implemented in vpImageFilter class.
Let us consider the following source code that comes from tutorial-image-filter.cpp.
Once build, you should have tutorial-image-filter binary. It shows how to apply different filters on an input image. Here we will consider lena.pgm as input image.

To see the resulting filtered images, just run:
The following sections give a line by line explanation of the source code dedicated to image filtering capabilities.
Lena input image is read from disk and is stored in I which is a gray level image declared as
To apply a Gaussian blur to this image we first have to declare a resulting floating-point image F. Then the blurred image could be obtained using the default Gaussian filter:
The resulting image is the following:

It is also possible to specify the Gaussian filter kernel size and the Gaussian standard deviation (sigma) using:
We thus obtain the following image:

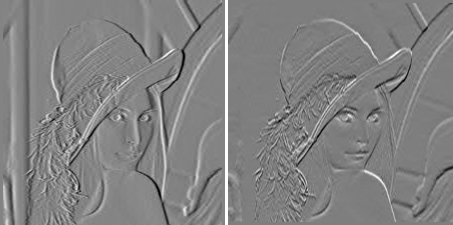
To compute the gradients or the spatial derivative along X use:
Gradients along Y could be obtained using:
The resulting floating-point images dIx, dIy are the following:
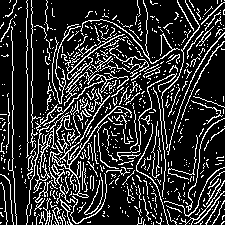
Canny edge detector function is only available if ViSP was build with OpenCV 2.1 or higher.
After the declaration of a new image container C, Canny edge detector is applied using:
Where:
The resulting image C is the following:
To apply a convolution to an image, we first have to define a kernel. For example, let us consider the 3x3 Sobel kernel defined in K.
![\[ {\bf K} = \begin{tabular}{|c|c|c|} \hline 1 & 0 & -1 \\ \hline 2 & 0 & -2 \\ \hline 1 & 0 & -1 \\ \hline \end{tabular} \]](form_1110.png)
After the declaration of a new floating-point image Gx, the convolution is obtained using:
The content of the filtered image Gx is the following.

To construct a pyramid of Gaussian filtered images as a vector of images implemented in pyr[] you may use:
The content of pyr[0], pyr[1], pyr[2] is the following:

You are now ready to see the next Tutorial: Blob tracking.
 1.8.9.1
1.8.9.1 
