Introduction
The Circle Hough Transform (CHT) is an image processing algorithm that permits to detect circles in an image. We refer the interested reader to the Wikipedia page to have a better understanding on the principles of the algorithm.
The ViSP implementation relies on the Gradient-based implementation of the algorithm.
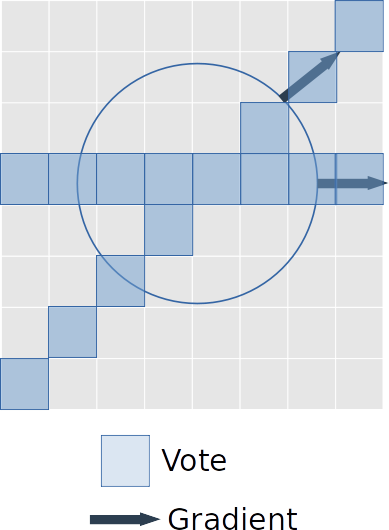
During the step where the algorithm votes for center candidates, we use the gradient information in order to reduce the dimensionality of the search space. Instead of voting in circular pattern, we vote along a straight line that follows the gradient.
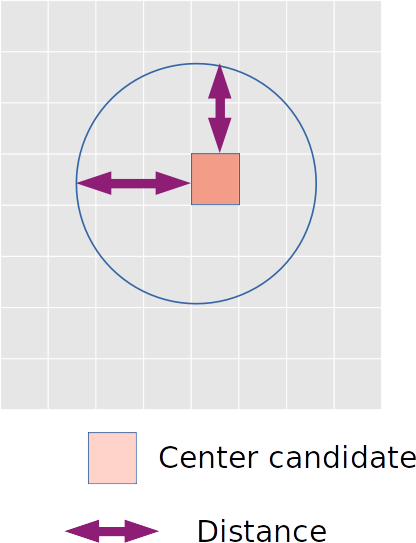
Then, during the step where the algorithm votes for radius candidates for each center candidate, we check the colinearity between the gradient at a considered point and the line which links the point towards the center candidate. If they are "enough" colinear, we increment the corresponding radius bin vote by 1. (NB: instead of incrementing one bin by one, we increment two bins by a number between 0 and 1 in our implementation to be more robust against the limits min and max of the radius and the bin size). The "enough" characteristic is controlled by the circle perfectness parameter.
How to use the tutorial
It is possible to configure the vpCircleHoughTransform class using a JSON file. To do so, you need to install JSON for modern C++ and compile ViSP with it.
You can also configure the vpCircleHoughTransform class using command line arguments. To know what are the different command line arguments the software accept, please run:
$ cd tutorial/imgproc/hough-transform
$ ./tutorial-circle-hough --help
To run the software on an image like coins2.jpg provided with the tutorial and using a JSON configuration file, please run:
$ ./tutorial-circle-hough --input coins2.jpg --config config/detector_img.json
If you would rather use the command line arguments, please run:
$ ./tutorial-circle-hough --input coins2.jpg \
--averaging-window-size 5 \
--canny-backend opencv-backend \
--filtering-type gaussianblur+scharr-filtering \
--canny-thresh -1 -1 \
--lower-canny-ratio 0.6 \
--upper-canny-ratio 0.9 \
--gaussian-kernel 5 \
--gaussian-sigma 1 \
--dilatation-kernel-size 5 \
--center-thresh 70 \
--circle-probability-thresh 0.725 \
--radius-limits 34 75 \
--merging-thresh 5 5 \
--circle-perfectness 0.65 \
--circle-probability-thresh 0.725 \
--center-xlim 0 1920 \
--center-ylim 0 1080 \
--expected-nb-centers -1 \
--edge-filter 3 \
--gradient-kernel 3
- Note
- The configuration file
config/detector_img.json has been tuned to detect circles in the image coins2.jpg. If the detections seem a bit off, you might need to change the parameters in config/detector_img.json or in the command line.
-
The default values of the program corresponds to these fine-tuned parameters. Running the program without any additionnal parameters should give the same result:
How to use a video
You can use the software to run circle detection on a video saved as a sequence of images that are named
For instance with ${BASENAME} = video_, you can have the following list of images: video_0001.png, video_0002.png and so on.
To run the software using a JSON configuration file, please run:
$ ./tutorial-circle-hough --input /path/to/video/${BASENAME}%d.png --config config/detector_img.json
To run the software using the command arguments, please run:
$ ./tutorial-circle-hough --input /path/to/video/${BASENAME}%d.png \
--averaging-window-size 5 \
--canny-backend opencv-backend \
--filtering-type gaussianblur+scharr-filtering \
--canny-thresh -1 -1 \
--lower-canny-ratio 0.6 \
--upper-canny-ratio 0.9 \
--gaussian-kernel 5 \
--gaussian-sigma 1 \
--dilatation-kernel-size 5 \
--center-thresh 70 \
--circle-probability-thresh 0.725 \
--radius-limits 34 75 \
--merging-thresh 5 5 \
--circle-perfectness 0.65 \
--circle-probability-thresh 0.725 \
--center-xlim 0 1920 \
--center-ylim 0 1080 \
--expected-nb-centers -1 \
--edge-filter 3 \
--gradient-kernel 3
Detailed explanations about the tutorial
If you decide to use a video as input, the relevant piece of code that permits to perform circle detection on the successive images of the video is the following:
if (opt_input.find("%") != std::string::npos) {
bool hasToContinue = true;
while (!g.
end() && hasToContinue) {
hasToContinue = run_detection(I_src, detector, opt_nbCirclesToDetect, false, opt_displayCanny);
}
}
Class that enables to manipulate easily a video file or a sequence of images. As it inherits from the...
void acquire(vpImage< vpRGBa > &I)
void open(vpImage< vpRGBa > &I)
void setFileName(const std::string &filename)
VISP_EXPORT int wait(double t0, double t)
If you decide to use a single image as input, the relevant piece of code that permits to perform circle detection on the image is the following:
}
run_detection(I_src, detector, opt_nbCirclesToDetect, true, opt_displayCanny);
error that can be emitted by ViSP classes.
static void read(vpImage< unsigned char > &I, const std::string &filename, int backend=IO_DEFAULT_BACKEND)
If you did not use a JSON file to configure the vpCircleHoughTransform detector, the following structure defines the parameters of the algorithm based on the command line arguments:
algoParams(opt_gaussianKernelSize
, opt_gaussianSigma
, opt_sobelKernelSize
, opt_lowerCannyThresh
, opt_upperCannyThresh
, opt_nbEdgeFilteringIter
, opt_centerXlimits
, opt_centerYlimits
, static_cast<float>(opt_minRadius)
, static_cast<float>(opt_maxRadius)
, opt_dilatationKerneSize
, opt_averagingWindowSize
, opt_centerThresh
, opt_circleProbaThresh
, opt_circlePerfectness
, opt_centerDistanceThresh
, opt_radiusDifferenceThresh
, opt_filteringAndGradientType
, opt_cannyBackendType
, opt_lowerCannyThreshRatio
, opt_upperCannyThreshRatio
, opt_expectedNbCenters
, opt_recordVotingPoints
, opt_visibilityRatioThresh
);
The initialization of the algorithm is performed in the following piece of code. If a JSON configuration file is given as input configuration, it will be preferred to the command line arguments:
if (opt_jsonFilePath.empty()) {
std::cout << "Initializing detector from the program arguments [...]" << std::endl;
detector.
init(algoParams);
}
else {
#ifdef VISP_HAVE_NLOHMANN_JSON
std::cout << "Initializing detector from JSON file \"" << opt_jsonFilePath << "\", some of the program arguments will be ignored [...]" << std::endl;
#else
#endif
}
@ functionNotImplementedError
Function not implemented.
To run the circle detection, you must call the following method:
std::vector<vpImageCircle> detectedCircles = detector.
detect(I_src, nbCirclesToDetect);
The call to vpCircleHoughTransform::getDetectionsProbabilities permits to know the confidence in each detection. It is sorted in the same way that are sorted the detections.
You could have also used the following method to get only the num_best best detections:
int num_best;
std::vector<vpImageCircle> detections = detector.detect(I, num_best);
Then, you can iterate on the vector of detections using a synthax similar to the following:
const unsigned int nbCircle = static_cast<unsigned int>(detectedCircles.size());
for (unsigned int idCircle = 0; idCircle < nbCircle; ++idCircle) {
const vpImageCircle &circleCandidate = detectedCircles[idCircle];
std::cout << "Circle #" << id << ":" << std::endl;
std::cout <<
"\tCenter: (" << circleCandidate.
getCenter() <<
")" << std::endl;
std::cout <<
"\tRadius: (" << circleCandidate.
getRadius() <<
")" << std::endl;
std::cout << "\tProba: " << probas[id] << std::endl;
std::cout <<
"\tTheoretical arc length: " << circleCandidate.
computeArcLengthInRoI(
vpRect(0, 0, I_src.getWidth(), I_src.getHeight())) << std::endl;
id++;
idColor = (idColor + 1) % v_colors.size();
}
#if (VISP_CXX_STANDARD >= VISP_CXX_STANDARD_17)
std::optional<vpImage<bool>> opt_mask = std::nullopt;
std::optional<std::vector<std::vector<std::pair<unsigned int, unsigned int>>>> opt_votingPoints = std::nullopt;
#elif (VISP_CXX_STANDARD >= VISP_CXX_STANDARD_11)
std::vector<std::vector<std::pair<unsigned int, unsigned int>>> *opt_votingPoints = nullptr;
#else
std::vector<std::vector<std::pair<unsigned int, unsigned int> > > *opt_votingPoints = NULL;
#endif
#if (VISP_CXX_STANDARD >= VISP_CXX_STANDARD_17)
if (opt_votingPoints)
#elif (VISP_CXX_STANDARD >= VISP_CXX_STANDARD_11)
if (opt_votingPoints != nullptr)
#else
if (opt_votingPoints != NULL)
#endif
{
const unsigned int crossSize = 3;
const unsigned int crossThickness = 1;
unsigned int nbVotedCircles = static_cast<unsigned int>(opt_votingPoints->size());
for (unsigned int idCircle = 0; idCircle < nbVotedCircles; ++idCircle) {
const std::vector<std::pair<unsigned int, unsigned int> > &votingPoints = (*opt_votingPoints)[idCircle];
unsigned int nbVotingPoints = static_cast<unsigned int>(votingPoints.size());
for (unsigned int idPoint = 0; idPoint < nbVotingPoints; ++idPoint) {
const std::pair<unsigned int, unsigned int> &pt = votingPoints[idPoint];
}
}
}
#if (VISP_CXX_STANDARD < VISP_CXX_STANDARD_17)
#if (VISP_CXX_STANDARD >= VISP_CXX_STANDARD_11)
if (opt_mask != nullptr)
#else
if (opt_mask != NULL)
#endif
{
delete opt_mask;
}
#if (VISP_CXX_STANDARD >= VISP_CXX_STANDARD_11)
if (opt_votingPoints != nullptr)
#else
if (opt_votingPoints != NULL)
#endif
{
delete opt_votingPoints;
}
#endif
Class that defines a 2D circle in an image.
vpImagePoint getCenter() const
float computeArcLengthInRoI(const vpRect &roi, const float &roundingTolerance=0.001f) const
static void drawCircle(vpImage< unsigned char > &I, const vpImageCircle &circle, unsigned char color, unsigned int thickness=1)
static void drawCross(vpImage< unsigned char > &I, const vpImagePoint &ip, unsigned int size, unsigned char color, unsigned int thickness=1)
Class that defines a 2D point in an image. This class is useful for image processing and stores only ...
Defines a rectangle in the plane.