|
Visual Servoing Platform
version 3.6.1 under development (2024-04-20)
|
|
Visual Servoing Platform
version 3.6.1 under development (2024-04-20)
|
#include <visp3/core/vpQuaternionVector.h>
 Inheritance diagram for vpQuaternionVector:
Inheritance diagram for vpQuaternionVector:Public Member Functions | |
| vpQuaternionVector () | |
| vpQuaternionVector (const vpQuaternionVector &q) | |
| vpQuaternionVector (const double qx, const double qy, const double qz, const double qw) | |
| vpQuaternionVector (const vpRotationMatrix &R) | |
| vpQuaternionVector (const vpThetaUVector &tu) | |
| vpQuaternionVector (const vpColVector &q) | |
| vpQuaternionVector (const std::vector< double > &q) | |
| vpQuaternionVector | buildFrom (const double qx, const double qy, const double qz, const double qw) |
| vpQuaternionVector | buildFrom (const vpRotationMatrix &R) |
| vpQuaternionVector | buildFrom (const vpThetaUVector &tu) |
| vpQuaternionVector | buildFrom (const vpColVector &q) |
| vpQuaternionVector | buildFrom (const std::vector< double > &q) |
| void | set (double x, double y, double z, double w) |
| const double & | x () const |
| const double & | y () const |
| const double & | z () const |
| const double & | w () const |
| double & | x () |
| double & | y () |
| double & | z () |
| double & | w () |
| vpQuaternionVector | operator+ (const vpQuaternionVector &q) const |
| vpQuaternionVector | operator- (const vpQuaternionVector &q) const |
| vpQuaternionVector | operator- () const |
| vpQuaternionVector | operator* (double l) const |
| vpQuaternionVector | operator* (const vpQuaternionVector &rq) const |
| vpQuaternionVector | operator/ (double l) const |
| vpQuaternionVector & | operator= (const vpColVector &q) |
| vpQuaternionVector & | operator= (const vpQuaternionVector &)=default |
| vpQuaternionVector & | operator= (const std::initializer_list< double > &list) |
| vpQuaternionVector | conjugate () const |
| vpQuaternionVector | inverse () const |
| double | magnitude () const |
| void | normalize () |
Inherited functionalities from vpArray2D | |
| unsigned int | getCols () const |
| double | getMaxValue () const |
| double | getMinValue () const |
| unsigned int | getRows () const |
| unsigned int | size () const |
| void | resize (unsigned int nrows, unsigned int ncols, bool flagNullify=true, bool recopy_=true) |
| void | reshape (unsigned int nrows, unsigned int ncols) |
| void | insert (const vpArray2D< double > &A, unsigned int r, unsigned int c) |
| bool | operator== (const vpArray2D< double > &A) const |
| bool | operator!= (const vpArray2D< double > &A) const |
| vpArray2D< double > | hadamard (const vpArray2D< double > &m) const |
Static Public Member Functions | |
| static double | dot (const vpQuaternionVector &q0, const vpQuaternionVector &q1) |
| static vpQuaternionVector | lerp (const vpQuaternionVector &q0, const vpQuaternionVector &q1, double t) |
| static vpQuaternionVector | nlerp (const vpQuaternionVector &q0, const vpQuaternionVector &q1, double t) |
| static vpQuaternionVector | slerp (const vpQuaternionVector &q0, const vpQuaternionVector &q1, double t) |
Public Attributes | |
| double * | data |
Protected Attributes | |
| unsigned int | rowNum |
| unsigned int | colNum |
| double ** | rowPtrs |
| unsigned int | dsize |
Related Functions | |
(Note that these are not member functions.) | |
| vpColVector | operator* (const double &x, const vpRotationVector &v) |
| enum | vpGEMMmethod |
| bool | operator== (const vpArray2D< double > &A) const |
| bool | operator== (const vpArray2D< float > &A) const |
| bool | operator!= (const vpArray2D< double > &A) const |
| void | vpGEMM (const vpArray2D< double > &A, const vpArray2D< double > &B, const double &alpha, const vpArray2D< double > &C, const double &beta, vpArray2D< double > &D, const unsigned int &ops=0) |
Inherited functionalities from vpRotationVector | |
| double & | operator[] (unsigned int i) |
| const double & | operator[] (unsigned int i) const |
| vpRotationVector & | operator<< (double val) |
| vpRotationVector & | operator, (double val) |
| double | sumSquare () const |
| vpRowVector | t () const |
| std::vector< double > | toStdVector () const |
| unsigned int | m_index |
Inherited I/O from vpArray2D with Static Public Member Functions | |
| vpArray2D< double > | insert (const vpArray2D< double > &A, const vpArray2D< double > &B, unsigned int r, unsigned int c) |
| static bool | load (const std::string &filename, vpArray2D< double > &A, bool binary=false, char *header=nullptr) |
| static bool | loadYAML (const std::string &filename, vpArray2D< double > &A, char *header=nullptr) |
| static bool | save (const std::string &filename, const vpArray2D< double > &A, bool binary=false, const char *header="") |
| static bool | saveYAML (const std::string &filename, const vpArray2D< double > &A, const char *header="") |
| static vpArray2D< double > | conv2 (const vpArray2D< double > &M, const vpArray2D< double > &kernel, const std::string &mode) |
| static void | conv2 (const vpArray2D< double > &M, const vpArray2D< double > &kernel, vpArray2D< double > &res, const std::string &mode) |
| static void | insert (const vpArray2D< double > &A, const vpArray2D< double > &B, vpArray2D< double > &C, unsigned int r, unsigned int c) |
Implementation of a rotation vector as quaternion angle minimal representation.
Defines a quaternion and its basic operations.
The vpQuaternionVector class is derived from vpRotationVector.
A quaternion is defined by four double values:  .
.
This class allows to compute a quaternion from a rotation matrix using either vpQuaternionVector(const vpRotationMatrix &) constructor or buildFrom() method.
It also defines common operations on a quaternion such as:
You can set values accessing each element:
You can also initialize the vector using operator<<(double):
Or you can also initialize the vector from a list of doubles if ViSP is build with c++11 enabled:
To get the values use:
or use getter:
Definition at line 104 of file vpQuaternionVector.h.
| vpQuaternionVector::vpQuaternionVector | ( | ) |
Default constructor that initialize all the 4 angles to zero.
Definition at line 55 of file vpQuaternionVector.cpp.
Referenced by conjugate(), operator*(), operator+(), operator-(), and operator/().
| vpQuaternionVector::vpQuaternionVector | ( | const vpQuaternionVector & | q | ) |
Copy constructor.
Definition at line 58 of file vpQuaternionVector.cpp.
| vpQuaternionVector::vpQuaternionVector | ( | const double | qx, |
| const double | qy, | ||
| const double | qz, | ||
| const double | qw | ||
| ) |
|
explicit |
Constructs a quaternion from a rotation matrix.
| R | : Matrix containing a rotation. |
Definition at line 77 of file vpQuaternionVector.cpp.
References buildFrom().
|
explicit |
Constructor that initialize  Euler angles vector from a
Euler angles vector from a  vector.
vector.
| tu | : representation of a rotation used here as input to initialize the Euler angles. |
Definition at line 85 of file vpQuaternionVector.cpp.
References buildFrom().
|
explicit |
Constructor from a 4-dimension vector of doubles.
Definition at line 67 of file vpQuaternionVector.cpp.
References buildFrom().
|
explicit |
Constructor from a 4-dimension vector of doubles.
Definition at line 70 of file vpQuaternionVector.cpp.
References buildFrom().
| vpQuaternionVector vpQuaternionVector::buildFrom | ( | const double | qx, |
| const double | qy, | ||
| const double | qz, | ||
| const double | qw | ||
| ) |
Manually change values of a quaternion.
| qx | : x quaternion parameter. |
| qy | : y quaternion parameter. |
| qz | : z quaternion parameter. |
| qw | : w quaternion parameter. |
Definition at line 110 of file vpQuaternionVector.cpp.
References set().
Referenced by buildFrom(), vp::eigen2visp(), vpHomogeneousMatrix::extract(), vpPoseVector::extract(), and vpQuaternionVector().
| vpQuaternionVector vpQuaternionVector::buildFrom | ( | const std::vector< double > & | q | ) |
Construct a quaternion vector from a 4-dim vector (x,y,z,w).
Definition at line 149 of file vpQuaternionVector.cpp.
References vpArray2D< double >::data, and vpException::dimensionError.
| vpQuaternionVector vpQuaternionVector::buildFrom | ( | const vpColVector & | q | ) |
Construct a quaternion vector from a 4-dim vector (x,y,z,w).
Definition at line 133 of file vpQuaternionVector.cpp.
References vpArray2D< double >::data, vpException::dimensionError, and vpArray2D< Type >::size().
| vpQuaternionVector vpQuaternionVector::buildFrom | ( | const vpRotationMatrix & | R | ) |
Constructs a quaternion from a rotation matrix.
| R | : Rotation matrix. |
Definition at line 254 of file vpQuaternionVector.cpp.
References vpThetaUVector::extract(), and set().
| vpQuaternionVector vpQuaternionVector::buildFrom | ( | const vpThetaUVector & | tu | ) |
Convert a vector into a quaternion.
| tu | : representation of a rotation used here as input. |
Definition at line 122 of file vpQuaternionVector.cpp.
References buildFrom().
| vpQuaternionVector vpQuaternionVector::conjugate | ( | ) | const |
Quaternion conjugate.
Definition at line 273 of file vpQuaternionVector.cpp.
References vpQuaternionVector(), w(), x(), y(), and z().
Referenced by inverse().
|
staticinherited |
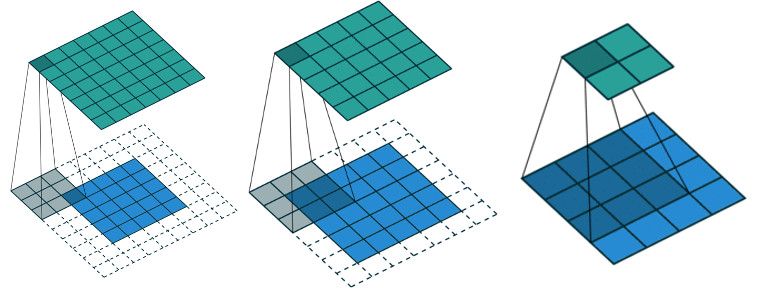
Perform a 2D convolution similar to Matlab conv2 function:  .
.
| M | : First matrix. |
| kernel | : Second matrix. |
| mode | : Convolution mode: "full" (default), "same", "valid". |
Definition at line 1029 of file vpArray2D.h.
|
staticinherited |
Perform a 2D convolution similar to Matlab conv2 function: .
| M | : First array. |
| kernel | : Second array. |
| res | : Result. |
| mode | : Convolution mode: "full" (default), "same", "valid". |
Definition at line 1043 of file vpArray2D.h.
|
static |
|
inlineinherited |
Return the number of columns of the 2D array.
Definition at line 327 of file vpArray2D.h.
|
inherited |
Return the array max value.
Definition at line 329 of file vpArray2D.h.
|
inherited |
Return the array min value.
Definition at line 331 of file vpArray2D.h.
|
inlineinherited |
Return the number of rows of the 2D array.
Definition at line 337 of file vpArray2D.h.
Compute the Hadamard product (element wise matrix multiplication).
| m | : Second matrix; |

Definition at line 625 of file vpArray2D.h.
|
inherited |
Insert array B in array A at the given position.
| A | : Main array. |
| B | : Array to insert. |
| r | : Index of the row where to add the array. |
| c | : Index of the column where to add the array. |
Definition at line 1057 of file vpArray2D.h.
|
inlineinherited |
Insert array A at the given position in the current array.
| A | : The array to insert. |
| r | : The index of the row to begin to insert data. |
| c | : The index of the column to begin to insert data. |
Definition at line 484 of file vpArray2D.h.
| vpQuaternionVector vpQuaternionVector::inverse | ( | ) | const |
Quaternion inverse.
Definition at line 280 of file vpQuaternionVector.cpp.
References conjugate(), vpMath::nul(), w(), x(), y(), and z().
|
static |
Compute Quaternion Linear intERPolation (LERP). See the following references:
| q0 | : Start quaternion. |
| q1 | : End quaternion. |
| t | : Interpolation value between [0, 1]. |
Definition at line 389 of file vpQuaternionVector.cpp.
References dot(), vpRotationVector::t(), w(), x(), y(), and z().
Referenced by nlerp().
|
inlinestaticinherited |
Load a matrix from a file.
| filename | : Absolute file name. |
| A | : Array to be loaded |
| binary | : If true the matrix is loaded from a binary file, else from a text file. |
| header | : Header of the file is loaded in this parameter. |
Definition at line 653 of file vpArray2D.h.
|
inlinestaticinherited |
Load an array from a YAML-formatted file.
| filename | : absolute file name. |
| A | : array to be loaded from the file. |
| header | : header of the file is loaded in this parameter. |
Definition at line 767 of file vpArray2D.h.
| double vpQuaternionVector::magnitude | ( | ) | const |
Quaternion magnitude or norm.
Definition at line 300 of file vpQuaternionVector.cpp.
References w(), x(), y(), and z().
Referenced by normalize().
|
static |
Compute Quaternion Normalized Linear intERPolation (NLERP). See the following references:
| q0 | : Start quaternion. |
| q1 | : End quaternion. |
| t | : Interpolation value between [0, 1]. |
Definition at line 423 of file vpQuaternionVector.cpp.
References lerp(), normalize(), and vpRotationVector::t().
| void vpQuaternionVector::normalize | ( | ) |
Normalize the quaternion.
Definition at line 305 of file vpQuaternionVector.cpp.
References magnitude(), vpMath::nul(), set(), w(), x(), y(), and z().
|
inherited |
Not equal to comparison operator of a 2D array.
Definition at line 509 of file vpArray2D.h.
| vpQuaternionVector vpQuaternionVector::operator* | ( | const vpQuaternionVector & | rq | ) | const |
Multiply two quaternions.
Definition at line 195 of file vpQuaternionVector.cpp.
References vpQuaternionVector(), w(), x(), y(), and z().
| vpQuaternionVector vpQuaternionVector::operator* | ( | double | l | ) | const |
Multiplication by scalar. Returns a quaternion defined by (lx,ly,lz,lw).
Definition at line 189 of file vpQuaternionVector.cpp.
References vpQuaternionVector(), w(), x(), y(), and z().
| vpQuaternionVector vpQuaternionVector::operator+ | ( | const vpQuaternionVector & | q | ) | const |
Quaternion addition.
Adds two quaternions. Addition is component-wise.
| q | : quaternion to add. |
Definition at line 169 of file vpQuaternionVector.cpp.
References vpQuaternionVector(), w(), x(), y(), and z().
|
inherited |
Set vector second and third element values.
| val | : Value of the vector element [rad]. |
The following example shows how to initialize a  vector from a list of 3 values [rad].
vector from a list of 3 values [rad].
It produces the following printings:
Definition at line 163 of file vpRotationVector.cpp.
References vpArray2D< double >::data, vpException::dimensionError, vpRotationVector::m_index, and vpArray2D< double >::size().
| vpQuaternionVector vpQuaternionVector::operator- | ( | void | ) | const |
Negate operator. Returns a quaternion defined by (-x,-y,-z-,-w).
Definition at line 186 of file vpQuaternionVector.cpp.
References vpQuaternionVector(), w(), x(), y(), and z().
| vpQuaternionVector vpQuaternionVector::operator- | ( | const vpQuaternionVector & | q | ) | const |
Quaternion subtraction.
subtracts a quaternion from another. subtraction is component-wise.
| q | : quaternion to subtract. |
Definition at line 180 of file vpQuaternionVector.cpp.
References vpQuaternionVector(), w(), x(), y(), and z().
| vpQuaternionVector vpQuaternionVector::operator/ | ( | double | l | ) | const |
Division by scalar. Returns a quaternion defined by (x/l,y/l,z/l,w/l).
Definition at line 204 of file vpQuaternionVector.cpp.
References vpException::fatalError, vpMath::nul(), vpQuaternionVector(), w(), x(), y(), and z().
|
inherited |
Set vector first element value.
| val | : Value of the vector first element [rad]. |
The following example shows how to initialize a vector from a list of 3 values [rad].
It produces the following printings:
Definition at line 133 of file vpRotationVector.cpp.
References vpArray2D< double >::data, and vpRotationVector::m_index.
| vpQuaternionVector & vpQuaternionVector::operator= | ( | const std::initializer_list< double > & | list | ) |
Set vector from a list of 4 double angle values.
It produces the following printings:
Definition at line 362 of file vpQuaternionVector.cpp.
References vpArray2D< double >::data, vpException::dimensionError, and vpArray2D< double >::size().
| vpQuaternionVector & vpQuaternionVector::operator= | ( | const vpColVector & | q | ) |
Copy operator that initializes a quaternion vector from a 4-dimension column vector q.
| q | : 4-dimension vector containing the values of the quaternion vector. |
Definition at line 236 of file vpQuaternionVector.cpp.
References vpArray2D< double >::data, vpException::dimensionError, and vpArray2D< Type >::size().
|
default |
Equal to comparison operator of a 2D array.
Definition at line 505 of file vpArray2D.h.
|
inlineinherited |
Operator that allows to set the value of an element of the rotation vector: r[i] = value
Definition at line 117 of file vpRotationVector.h.
|
inlineinherited |
Operator that allows to get the value of an element of the rotation vector: value = r[i]
Definition at line 122 of file vpRotationVector.h.
|
inlineinherited |
Definition at line 443 of file vpArray2D.h.
|
inlineinherited |
Set the size of the array and initialize all the values to zero.
| nrows | : number of rows. |
| ncols | : number of column. |
| flagNullify | : if true, then the array is re-initialized to 0 after resize. If false, the initial values from the common part of the array (common part between old and new version of the array) are kept. Default value is true. |
| recopy_ | : if true, will perform an explicit recopy of the old data. |
Definition at line 352 of file vpArray2D.h.
|
inlinestaticinherited |
Save a matrix to a file.
| filename | : Absolute file name. |
| A | : Array to be saved. |
| binary | : If true the matrix is saved in a binary file, else a text file. |
| header | : Optional line that will be saved at the beginning of the file. |
Warning : If you save the matrix as in a text file the precision is less than if you save it in a binary file.
Definition at line 855 of file vpArray2D.h.
|
inlinestaticinherited |
Save an array in a YAML-formatted file.
| filename | : absolute file name. |
| A | : array to be saved in the file. |
| header | : optional lines that will be saved at the beginning of the file. Should be YAML-formatted and will adapt to the indentation if any. |
Here is an example of outputs.
Content of matrix.yml:
Content of matrixIndent.yml:
Definition at line 950 of file vpArray2D.h.
| void vpQuaternionVector::set | ( | double | qx, |
| double | qy, | ||
| double | qz, | ||
| double | qw | ||
| ) |
Manually change values of a quaternion.
| qx | : x quaternion parameter. |
| qy | : y quaternion parameter. |
| qz | : z quaternion parameter. |
| qw | : w quaternion parameter. |
Definition at line 94 of file vpQuaternionVector.cpp.
References vpArray2D< double >::data.
Referenced by buildFrom(), normalize(), and vpQuaternionVector().
|
inlineinherited |
Return the number of elements of the 2D array.
Definition at line 339 of file vpArray2D.h.
|
static |
Compute Quaternion Spherical Linear intERPolation (SLERP). See the following references:
| q0 | : Start quaternion. |
| q1 | : End quaternion. |
| t | : Interpolation value between [0, 1]. |
Definition at line 447 of file vpQuaternionVector.cpp.
References dot(), normalize(), vpRotationVector::t(), w(), x(), y(), and z().
|
inherited |
Return the sum square of all the elements  of the rotation vector r(m).
of the rotation vector r(m).
![\[\sum{i=0}^{m} r_i^{2}\]](form_573.png)
Definition at line 182 of file vpRotationVector.cpp.
References vpArray2D< double >::rowNum, and vpArray2D< double >::rowPtrs.
|
inherited |
Return the transpose of the rotation vector.
Definition at line 53 of file vpRotationVector.cpp.
References vpArray2D< double >::data, and vpArray2D< double >::dsize.
|
inherited |
Converts the vpRotationVector to a std::vector.
Definition at line 68 of file vpRotationVector.cpp.
References vpArray2D< double >::data, and vpArray2D< double >::size().
| double & vpQuaternionVector::w | ( | ) |
Returns a reference to the w-component of the quaternion.
Definition at line 342 of file vpQuaternionVector.cpp.
References vpArray2D< double >::data.
| const double & vpQuaternionVector::w | ( | ) | const |
Returns the w-component of the quaternion.
Definition at line 333 of file vpQuaternionVector.cpp.
References vpArray2D< double >::data.
Referenced by vpRotationMatrix::buildFrom(), conjugate(), dot(), inverse(), lerp(), magnitude(), normalize(), operator*(), operator+(), operator-(), operator/(), slerp(), and vp::visp2eigen().
| double & vpQuaternionVector::x | ( | ) |
Returns a reference to the x-component of the quaternion.
Definition at line 336 of file vpQuaternionVector.cpp.
References vpArray2D< double >::data.
| const double & vpQuaternionVector::x | ( | ) | const |
Returns the x-component of the quaternion.
Definition at line 327 of file vpQuaternionVector.cpp.
References vpArray2D< double >::data.
Referenced by vpRotationMatrix::buildFrom(), conjugate(), dot(), inverse(), lerp(), magnitude(), normalize(), operator*(), operator+(), operator-(), operator/(), slerp(), and vp::visp2eigen().
| double & vpQuaternionVector::y | ( | ) |
Returns a reference to the y-component of the quaternion.
Definition at line 338 of file vpQuaternionVector.cpp.
References vpArray2D< double >::data.
| const double & vpQuaternionVector::y | ( | ) | const |
Returns the y-component of the quaternion.
Definition at line 329 of file vpQuaternionVector.cpp.
References vpArray2D< double >::data.
Referenced by vpRotationMatrix::buildFrom(), conjugate(), dot(), inverse(), lerp(), magnitude(), normalize(), operator*(), operator+(), operator-(), operator/(), slerp(), and vp::visp2eigen().
| double & vpQuaternionVector::z | ( | ) |
Returns a reference to the z-component of the quaternion.
Definition at line 340 of file vpQuaternionVector.cpp.
References vpArray2D< double >::data.
| const double & vpQuaternionVector::z | ( | ) | const |
Returns the z-component of the quaternion.
Definition at line 331 of file vpQuaternionVector.cpp.
References vpArray2D< double >::data.
Referenced by vpRotationMatrix::buildFrom(), conjugate(), dot(), inverse(), lerp(), magnitude(), normalize(), operator*(), operator+(), operator-(), operator/(), slerp(), and vp::visp2eigen().
|
related |
Insert array B in array A at the given position.
| A | : Main array. |
| B | : Array to insert. |
| C | : Result array. |
| r | : Index of the row where to insert array B. |
| c | : Index of the column where to insert array B. |
Definition at line 1072 of file vpArray2D.h.
|
related |
Definition at line 1300 of file vpArray2D.h.
|
related |
Allows to multiply a scalar by rotaion vector.
Definition at line 103 of file vpRotationVector.cpp.
|
related |
Definition at line 1264 of file vpArray2D.h.
|
related |
Definition at line 1282 of file vpArray2D.h.
|
related |
This function performs generalized matrix multiplication: D = alpha*op(A)*op(B) + beta*op(C), where op(X) is X or X^T. Operation on A, B and C matrices is described by enumeration vpGEMMmethod().
For example, to compute D = alpha*A^T*B^T+beta*C we need to call :
If C is not used, vpGEMM must be called using an empty array null. Thus to compute D = alpha*A^T*B, we have to call:
| vpException::incorrectMatrixSizeError | if the sizes of the matrices do not allow the operations. |
| A | : An array that could be a vpMatrix. |
| B | : An array that could be a vpMatrix. |
| alpha | : A scalar. |
| C | : An array that could be a vpMatrix. |
| beta | : A scalar. |
| D | : The resulting array that could be a vpMatrix. |
| ops | : A scalar describing operation applied on the matrices. Possible values are the one defined in vpGEMMmethod(): VP_GEMM_A_T, VP_GEMM_B_T, VP_GEMM_C_T. |
|
related |
Enumeration of the operations applied on matrices in vpGEMM() function.
Operations are :
|
protectedinherited |
Number of columns in the array.
Definition at line 131 of file vpArray2D.h.
|
inherited |
Address of the first element of the data array.
Definition at line 139 of file vpArray2D.h.
|
protectedinherited |
Current array size (rowNum * colNum)
Definition at line 135 of file vpArray2D.h.
|
protectedinherited |
Definition at line 151 of file vpRotationVector.h.
Referenced by vpRotationVector::operator,(), and vpRotationVector::operator<<().
|
protectedinherited |
Number of rows in the array.
Definition at line 129 of file vpArray2D.h.
|
protectedinherited |
Address of the first element of each rows.
Definition at line 133 of file vpArray2D.h.